「ロボットの作り方2009」講演会レポート
(86/93)
前の画像
この写真の記事へ
次の画像
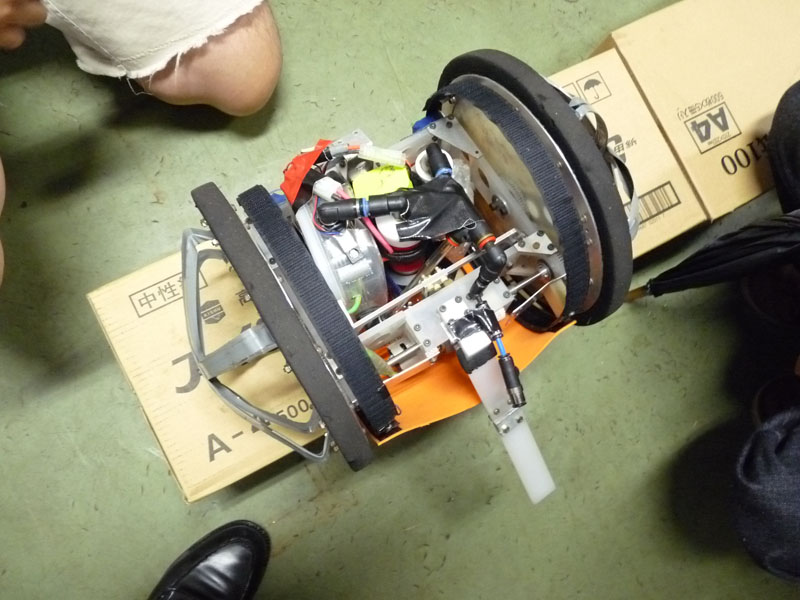
【写真69】Leg-in-rotor-Vの内部構造。両サイドにある受動収納脚に注目。機体がどのような姿勢になっていても立て直して跳躍できる仕組み
前の画像
この写真の記事へ
次の画像
関連記事
【2009年6月16日】世界一長いヘビ型ロボットは作れるか!? ギネスにチャレンジ
~ロボット学会、工学セミナーレポート(実習編)
http://robot.watch.impress.co.jp/docs/news/20090616_294222.html