「筑波宇宙センター特別公開」レポート
(41/68)
前の画像
この写真の記事へ
次の画像
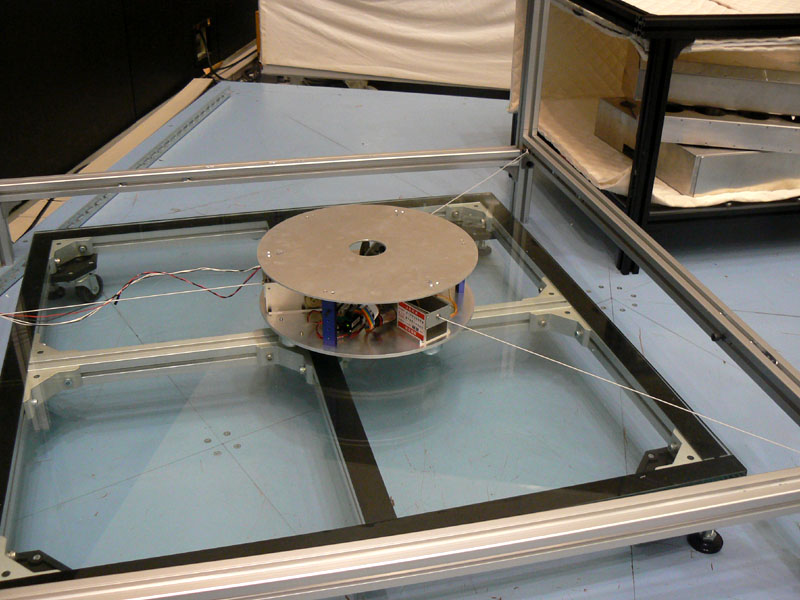
EVA支援ロボットは、ロボット本体から3本以上のテザー(ヒモ)を張り、テザーの長さを調整することによって空間を移動する
前の画像
この写真の記事へ
次の画像
関連記事
【2009年4月3日】H-IIBロケットの燃焼試験が種子島で実施
~延期は引き継ぎ不足などの人為的ミスが原因
http://robot.watch.impress.co.jp/cda/news/2009/04/03/1704.html
【2009年3月26日】JAXAがH-IIBロケットの開発状況を説明
~実機による燃焼試験は3月27日と4月11日に実施予定
http://robot.watch.impress.co.jp/cda/news/2009/03/26/1681.html
【2008年10月31日】JAXAが「筑波宇宙センター特別公開」を開催
~HTVのエンジニアリングモデルが初公開
http://robot.watch.impress.co.jp/cda/news/2008/10/31/1414.html