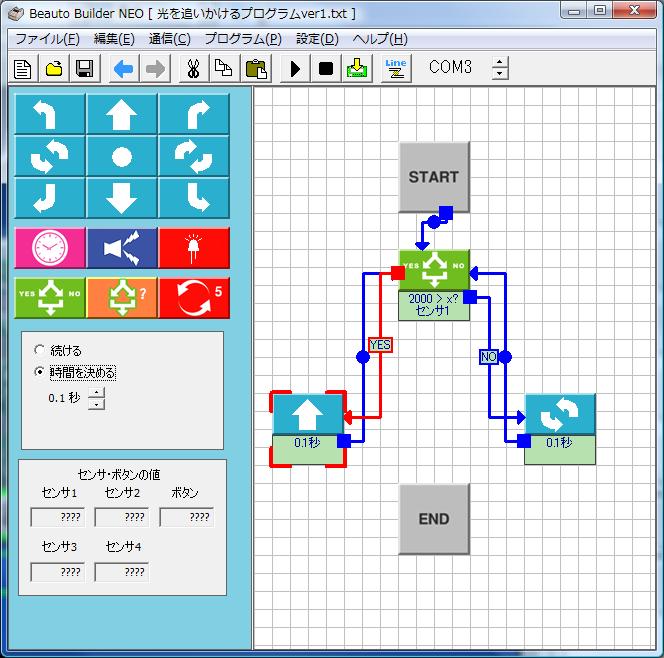
実際にBeauto Builder NEOで書くとこのようになりました。センサ1の値が2,000以下のとき前進、値が2,000以上のときに左旋回を行ないます。動作を継続して続けるために前進や旋回を行なった後、ENDにつなげず繰り返し条件分岐ブロックに行くようにしています
Copyright (c) 2009 Impress Watch Corporation, an Impress Group company. All rights reserved.