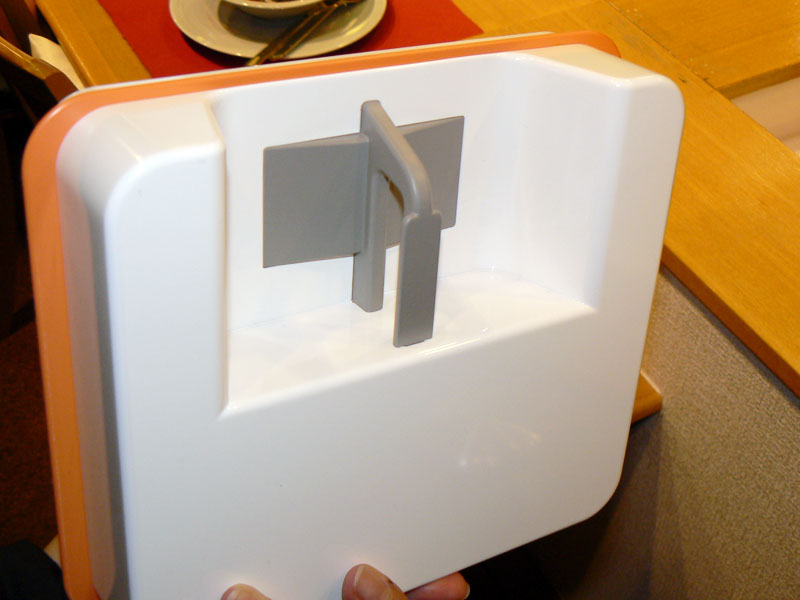
多少の位置ズレがあっても吸収するようにテーパーを付けるなど、ロボットが把持しやすい形状にデザインされている
Copyright (c) 2009 Impress Watch Corporation, an Impress Group company. All rights reserved.