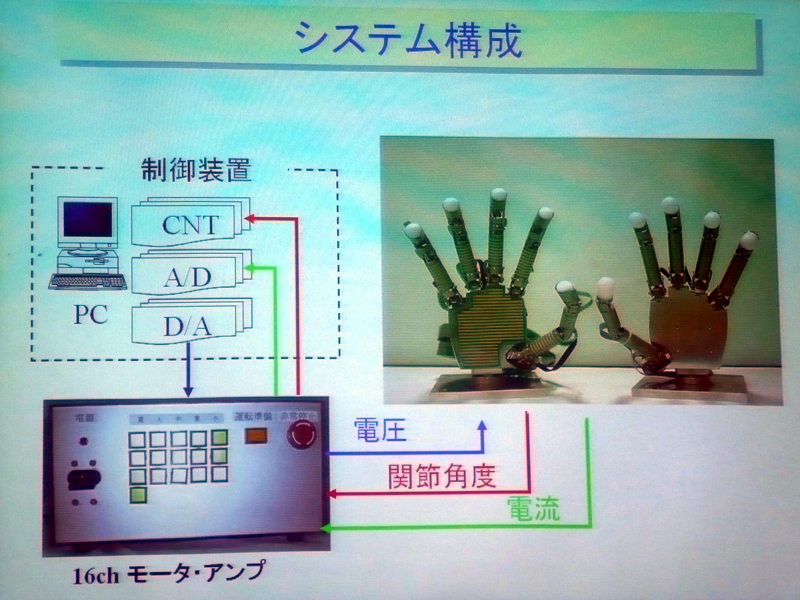
【写真7】システムの全体構成。パソコン側からサーボモータに指令電圧を出す。モータが動くとエンコーダからパルスが返る。これをフィードバックして位置・速度制御の指針とする。またモータ電流値を制御システム側に戻して、トルクをコントロールすることも可能だ
Copyright (c) 2008 Impress Watch Corporation, an Impress Group company. All rights reserved.