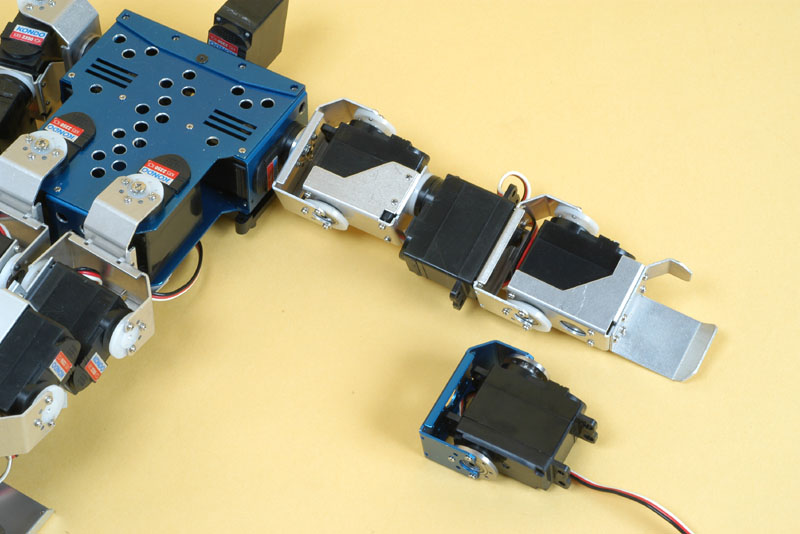
このように置くと分かりやすい。サーボモーターが回転すると、二の腕から先が動くことになる。このようにサーボモーターとその他のパーツを組み合わせることで、2足歩行ロボットが出来上がる
Copyright (c) 2006 Impress Watch Corporation, an Impress Group company. All rights reserved.