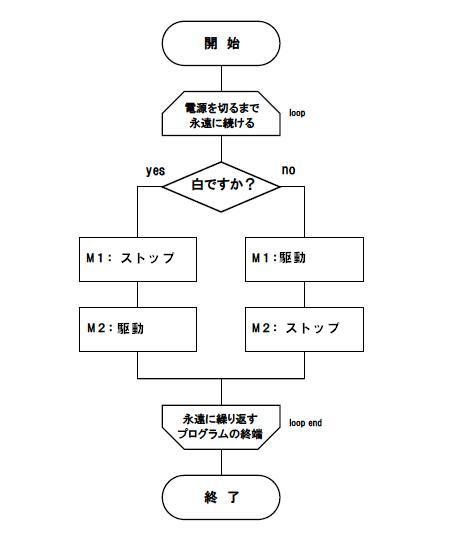
【図2】ライントレースのフローチャート。赤外線センサの閾値を基準に、それよりも下の値ならライン上と見なし、ロボット本体を左に制御(モータM1のみ動かす)。一方、閾値より上の値ならラインから外れていると見なし、本体を右に制御(モータM2のみ動かす)
Copyright (c) 2006 Impress Watch Corporation, an Impress Group company. All rights reserved.