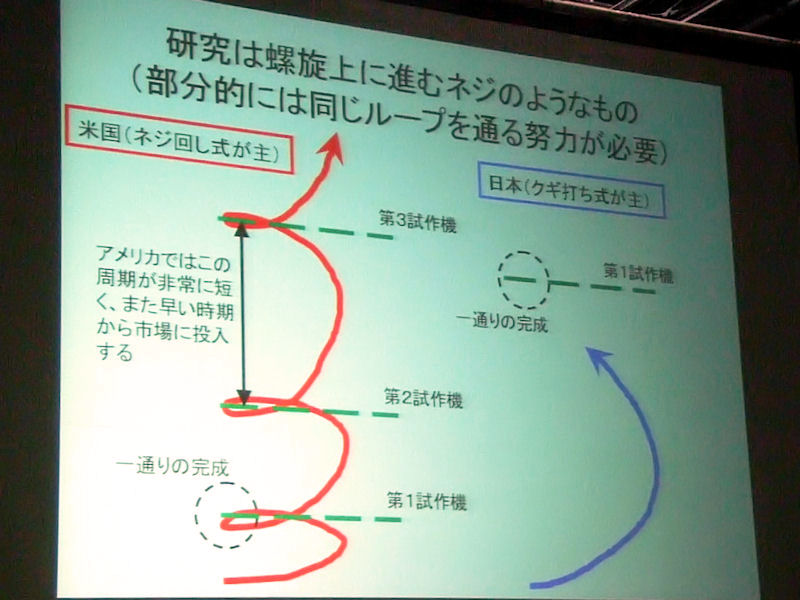
2週間などの短い周期で試作を行ない、それを基に次の試作を積み重ねることで目標に到達する米国のねじ回し式の研究の進め方に対し、日本の研究の進め方はシミュレーションなどで7割くらい問題を解決してから実際のロボットを製作する、釘打ち式であると理一郎氏は指摘する
Copyright (c) 2008 Impress Watch Corporation, an Impress Group company. All rights reserved.