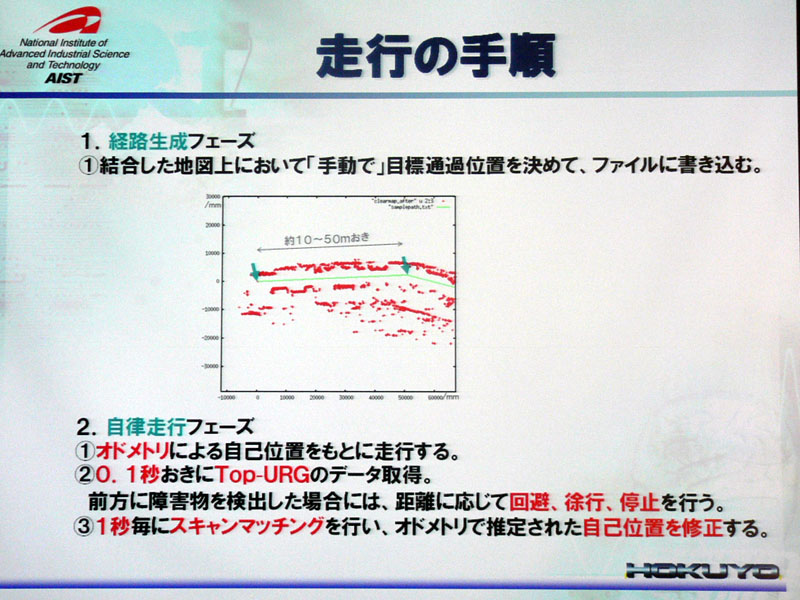
走行の手順。地図上で手動で目標通過位置を決め、オドメトリによる自己位置をもとに走行する。Top-URGによって前方に障害物を検出した場合は、回避や徐行、停止を行なう。また、1秒ごとにスキャンマッチングを行ない、自己位置を修正する
Copyright (c) 2008 Impress Watch Corporation, an Impress Group company. All rights reserved.