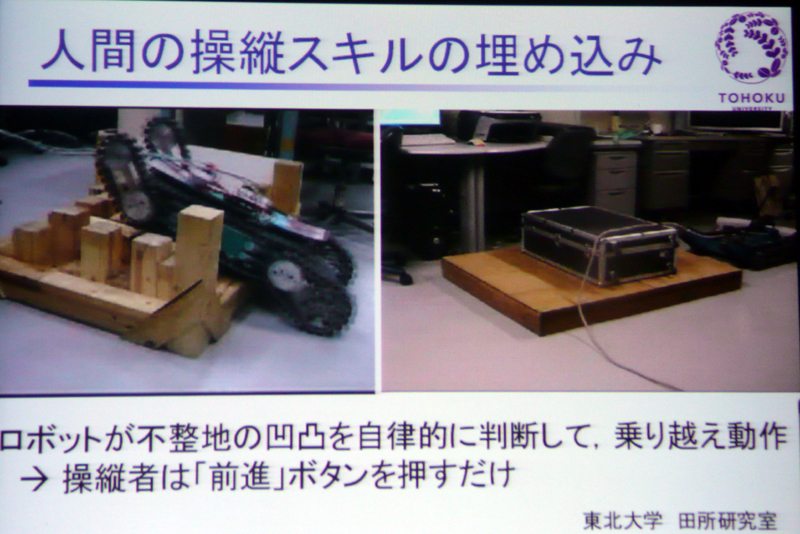
【写真32】田所教授が研究している、オペレータの操縦スキルをロボット側に埋め込む技術。多数の関節があるようなロボットでは、簡易な制御方法が求められる
Copyright (c) 2007 Impress Watch Corporation, an Impress Group company. All rights reserved.