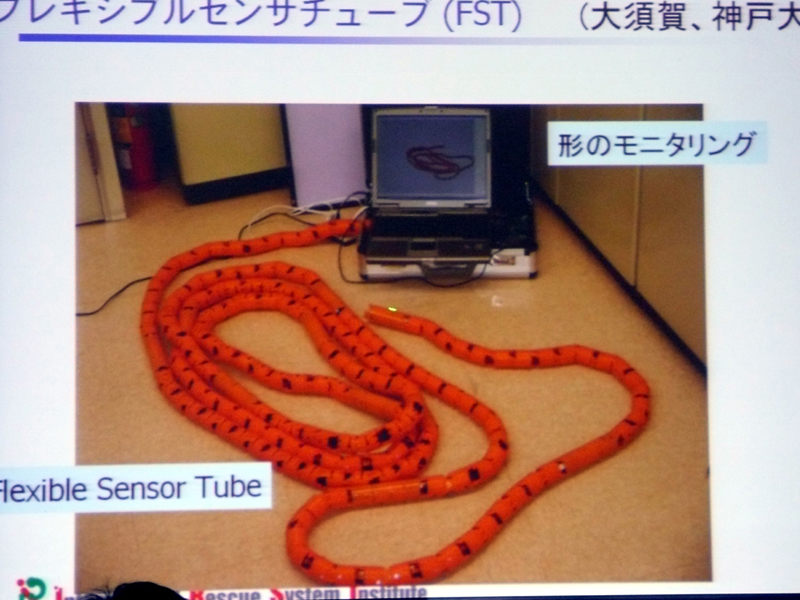
【写真31】神戸大学の大須賀研究室で開発されているフレキシブルセンサチューブ。瓦礫内に深く潜り込んだロボットの位置を特定できる。これも瓦礫内探査システムとしてインテグレートされている
Copyright (c) 2007 Impress Watch Corporation, an Impress Group company. All rights reserved.