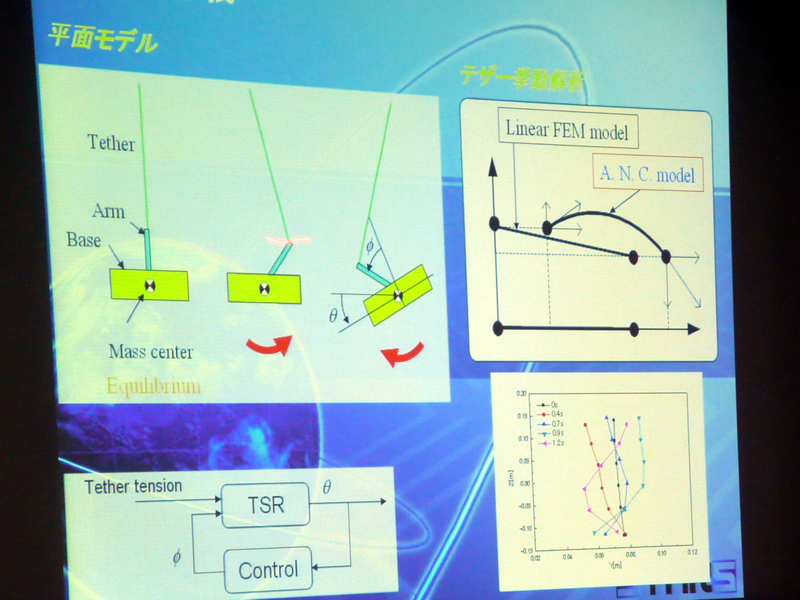
【写真27】テザーとロボットアームによる姿勢制御。ベースの姿勢角(θ)をフィードバックし、アームの傾斜角(φ)を決定。発生する回転力を利用して衛星の姿勢を安定させる
Copyright (c) 2007 Impress Watch Corporation, an Impress Group company. All rights reserved.