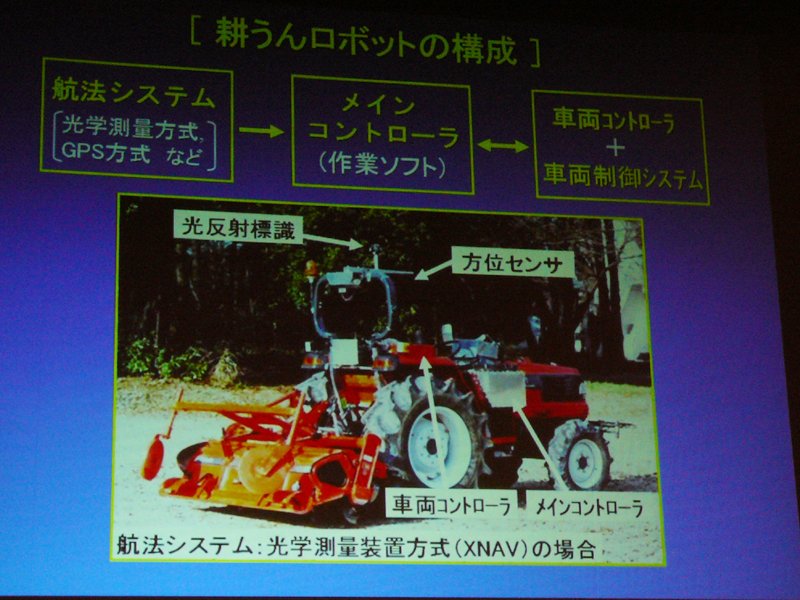
【写真3】耕運ロボットの構成。機体の航法システムに光学測量方式を採用した「XNAV」を搭載。基準局として自動追尾型測量装置を設置し、機体の光反射標識を自動追尾しながら位置を計測する
Copyright (c) 2007 Impress Watch Corporation, an Impress Group company. All rights reserved.