坂本元氏、産業技術短期大学で講演
~「夢はガンダム」、来年1月に2mロボットがオペラ出演
 |
| 産業技術短期大学 |
2009年10月3日、産業技術短期大学が「公開セミナー2009」を開催した。科学技術の未来に夢と希望を持ち、創造力を発揮できる技術者が必要との理念のもと、「ロボカップ ジャパンオープン2009」のヒューマノイドリーグで優勝した坂本元氏の講演とロボットのデモンストレーションを行なった。
坂本元氏は、産業技術短期大学の非常勤講師も勤めている。講演の後は坂本氏、牛尾誠夫学長、二井見博文本学准教授の3名で座談会を実施した。
●子どもの頃から思い続けた「夢はガンダム」
坂本氏は、巨大ロボットを作る夢を追い続けロボットベンチャーを立ち上げた。自作のロボットで、ロボカップ世界大会のヒューマノイドリーグ優勝をはじめ、国内外のロボット競技会で、10回以上優勝している。今夏、オーストリア・グラーツで開催した「ロボカップ世界大会2009」には、千葉工業大学の「CIT Brains」のメンバーとして日本代表から唯一出場した。CIT Brainsは、身長1m以上あるTEENサイズが2位、KIDが3位に入賞した。ドイツやチリの大学も坂本氏の製作したロボットをベースにヒューマノイドロボットの研究をしている。今年ロボカップで、ベストヒューマノイドを受賞したDarmstadt Dribblers (ドイツ/ダルムシュタット工科大学)もはじめロボット30号機をカスタマイズしている。
 |  |
| 坂本元氏(有限会社はじめ研究所 代表) | 「ロボカップ世界大会2009」でもはじめロボットが活躍した |
坂本氏の会社は、大阪市西淀川区の町工場が集まる地域にある。板金や試作など、地元企業経営者の支援を受けて、ロボットの開発を行なっている。
坂本氏がロボット開発を志すようになったのは、中学生時代にTVアニメ「機動戦士ガンダム」を見て非常に感動したことがきっかけだという。高校時代は、ガンダムのプラモデルに夢中になっていたそうだ。もちろん当時は、二足歩行ロボットは現実に作れるものではなかった。しかし、「21世紀には実現するかもしれない」と思い、ガンダムを作れるような就職先を模索しながら、大学・就職とエンジニアの道を選んだ。大学卒業後、川崎重工業株式会社に入社し、新幹線の車体傾斜制御やガスタービン発電機の制御など「ガンダムよりも大きなものを作ってきた」という。
独立して起業したのは、ホンダのASIMOが歩いたニュースで見たのがきっかけになった。ロボットを作りたい思いが蘇り、西淀川区の町工場の中に事務所を借りて、有限会社はじめ研究所を設立した。それが2002年のことだ。
最初は技術も資金もないため、小型ヒューマノイドの開発から始めた。2002年の1号機からスタートして、7年間で33号機まで製作。最初の頃は、二足歩行ロボット競技会「ROBO-ONE」に出場したり、会話をしながら太極拳をするロボットを作ったりしていた。太極拳は、全体のバランスを保ちながら動くのが難しく、当時はかなり注目されたそうだ。最新型の33号機は、2m以上ある大きなロボットでニュースにも取り上げられた。
 |  |  |
| 【動画】音声で番号で指示すると、太極拳のモーションをするロボット | 【動画】はじめロボット10号機のバトルモーション。正拳突きや足技など | 【動画】バトルの必殺技。回転浴びせ蹴り |
 |  |  |
| 【動画】歩行や方向転換のモーション | 【動画】ガッツポーズや悔しがるなどヒューマノイドロボットならではの感情表現 | 最新型の33号機は、2m10cmの大型二足歩行ロボット |
これらのロボットを、坂本氏は自分で設計して製作している。頭の中でイメージしたロボットのボディフレームは3次元CADを使って、立体的に描く。そのデータを2次元の機械図面に変換して、事務所の隣にある板金屋さんに持って行き、作ってもらった部品を事務所で組み立てているわけだ。
人間の筋肉にあたるアクチュエータは、モータを使用している。稼働する関節ごとにモーターが入っているので、人間に近づけるためには、多数のモーターが必要になる。例えば、足首だけでもピッチ軸とヨー軸の2個が搭載されている。はじめロボットは、片足だけで6個、全身で21個のモーターを使用している。歩くときには、多数のモータを全て同期して動かす技術が要求される。
そして頭脳にあたるマイコンボードは、はじめロボットの場合、胸と背中に搭載している。胸のマイコンは歩行やキックを担当。背中のボードは、画像処理の目の部分と自律判断の処理と分担している。開発効率を上げるために、胸のマイコンが小脳の役割、背中は大脳の役割と切り分けているのだ。また、ボディにはロボットの傾きを検出するジャイロセンサ、頭には周囲の状況を認識するカメラを搭載している。
80817.jpg
ロボットの部品。市販品や自作パーツを組み合わせて構成されている
「二足歩行ロボットは歩かせるのが非常に難しい」と坂本氏はいう。開発当初の2号機は非常にゆっくりした動きしかできなかったそうだ。その後、もっと速く歩かせたいと研究を重ね、2004年には、人が歩く時のように前進する勢いを使って移動する動歩行に近くなった。歩行ができれば、次の目標は走ることになる。“走る”の定義は、両足が同時に浮いていることが条件の1つとされている。ロボットが、一瞬、空中に浮いているわけで、バランスを取るのが難しかったという。
もっと自然な歩行を実現したいと、坂本氏の研究は続いた。一般的なロボットの歩行は、膝を曲げて一歩一歩前進する。人間もこの歩行を真似してみると、足の筋肉がすぐに痛くなる。つまりロボットにとっても、モーターに負担がかかりエネルギー消費が大きいということが言える。だから、人間は膝を伸ばしてスッスッと歩いているわけだ。坂本氏が紹介した動画では、膝に黄色テープを貼り、膝が伸びていることを確認できるようになっている。この歩行は、去年のエンタテインメントコンピューティング2008で発表し、芸術科学会の優秀論文賞を受賞している。
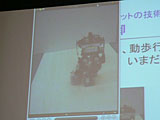
このようにロボットの歩行はどんどん進化し、最近は平地なら歩けるロボットが増えている。しかし、実際に二足歩行ロボットを生活に活用する場合、凸凹道への対応も必須となる。人間ならば、多少の段差で転ぶことはないが、現在のロボットにとって不整地の歩行は難しい。2006年にロボカップで行なわれた不整地走行の競技では、最大25mmの凹凸があるフィールドを歩行する競技が行なわれた。この競技で、はじめロボットは1mの距離を7秒ほどでゴールし優勝した。完走できたのははじめロボット以外にもう1体だけで、そのロボットは70秒以上掛かっていた。「不整地歩行は、ロボットにとってそれくらい難しい課題である」と坂本氏はいう。
 |  |  |
| 歩行技術の進化 | 【動画】はじめロボット2号機の静歩行。非常にゆっくりとした動き | 【動画】2004年には動歩行ができるようになった |
 |  |  |
| 【動画】今では、走ることができるようになった | エンタテインメントコンピューティング2008で発表した「平行リンク機構を用いたヒューマノイド・ロボットの膝関節伸展歩行」 | 膝を曲げたロボットの歩行を真似る坂本氏 |
 |  |  |
| 【動画】脚の側面にテープを貼り、膝関節伸展歩行を分かりやすくデモンストレーション | 【動画】従来の膝を曲げた歩行 | 【動画】ロボカップジャパンオープン(2006年)で実施した不整地走行競技 |
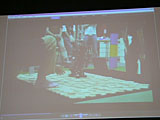
続いて坂本氏は、ステージ上でロボカップ用に開発したはじめロボットの自律モーションの実演を行なった。ロボットに搭載したカメラが捉えた映像をスクリーンに映すと、オレンジ色のボールをロボットが認識するようすが分かる。最初にボールまでの距離が512とでている。このボールの位置を変えるとロボットが再計測し、結果を表示する。
ボールまでの距離を把握すると、ロボットは目標地点まで歩いていきボールを蹴る。今回は、実際のフィールドと違うので、歩行の振動でボールが転がってしまいうまく蹴れない場面もあったが、スクリーンを見るとロボットが常にボールを検出しているのが分かった。例えば、ロボットが倒れても自分で起き上がりボールに向かう。サッカーでは競技中に、相手プレイヤーと接触して倒れることもあるので、こうした機能も必須となる。
 |  |  |
| 【動画】搭載のカメラで周囲を認識し、オレンジ色のボールまでの距離を計測する | 【動画】ロボットが常に自律でボールを発見し、蹴る。 | 【動画】倒れた状態から起き上がり、ボールを認識する |
ロボカップヒューマノイドリーグのKIDSでは、1チーム3体のロボットがサッカーの試合をする。世界大会では、既に自律ロボットがチームプレイをするレベルになっているそうだ。お互いがぶつからないように動いたり、ゴールキーパーが試合の状況を見て前に出てきたりする。役目を終えたキーパーは、すかさずゴールに戻る。味方ロボットが倒れれば、素早くフォローに回るなどの連携プレーも、今年優勝したDarmstadt Dribblersのチームは実現していたと動画で紹介した。
身長が1m以上のTeenクラスは、まだゲーム形式の競技は行なわれていない。このサイズのロボットが接触し倒れた場合、破損する危険性が高いためだ。今は、ドリブル&PKという形式で競技をしている段階だ。自分の後に置かれたボールを、センターラインまでドリブルで運び、ラインを越えたらPKと同じように蹴ってシュートを狙う競技だ。二足歩行ロボットは歩くだけでも大変なので、ボールを思い通りに蹴りながら移動するのは非常に難しい。千葉工業大学と共同で開発したはじめロボット39号機がシュートし、相手ロボットがコースを読んでセーブした場面が紹介された。来年からはTeenサイズも、ゲーム形式で競技を行なうかもしれないそうだ。
 |  |  |
| 【動画】ロボカップ世界大会の動画。青い方がはじめロボットで、連携プレーをしている | 【動画】Teenサイズのドリブル&PK競技。相手もちゃんと自律でコースを読んでいる | 【動画】Teenサイズの起き上がりモーション。試合が行われる場合、必須の機能となる |
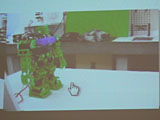
最後に身長2m10cmの世界最大級の二足歩行ロボットをステージで実演した。身長165cmの坂本さんと並ぶと、その大きさがよく分かる。このはじめロボット33号機は、今年開発し5月のロボカップジャパンオープンで公開した。このロボットは、全リーグの中から1チームに贈られる日本ロボット学会賞を受賞している。
これだけ大きいと静展示しておくのも大変だ。はじめロボット33号機は、脚立に支柱を取り付けてロボットの腰を支えていた。歩行時は、転倒防止用に坂本さんが紐を持って支えている。モーターの音をさせながらロボットが歩き回り、前進や旋回、手を振って挨拶などのモーションを披露したあと、ボールを蹴った。このサイズになると、ボールを蹴るために片足でバランスを取るのは、かなり難易度が高いそうだ。
このはじめロボット33号機は、2010年1月にオペラ「カルメン」への出演が決まっているという。
 |  |  |
| 世界最大級の二足歩行ロボット「はじめロボット33号機」 | はじめロボット33号機のスペック | 【動画】はじめロボット33号機の歩行。前進、後退、方向転換 |
 |  |  |
| 【動画】おじぎや手を振るなどのモーションも搭載されている | 【動画】足元のボールをキックする | 【動画】後退から横歩き |
坂本氏の夢は、講演タイトルにもあるように、「身長18mの歩くガンダムを作る」ことだ。そのための次のステップとして、今は4mロボットを開発中だという。4mが完成したら8m、次に18mと大きくしていくスケジュールだ。坂本氏の夢を支援してくれる大阪西淀川経営改善研究会という町工場の社長さんで組織する異業種交流会のメンバーに試験装置を作ってもらい、モーターの強度試験をするなど研究を進めている。
坂本氏が全国各地で講演をすると、子ども達から「何を勉強したらロボットを作れるようになるか?」と質問されることが多いそうだ。そういう時は「ロボットが大好きになれば、作れるようになる」と答えているという。坂本氏は、「夢のあるロボットを見た人が、元気になってくれたら嬉しい」と講演を締めくくった。
 |  |  |
| 【動画】地元の支援企業と一緒にモーターの研究開発などを行い、ガンダム製作の夢を追いかけている | スポンサー企業名が2mロボットの膝に記されている | 講演後、多くの人がロボットを間近で見たり操縦したりしながら、坂本氏に具体的な質問を投げかけていた |
●座談会「ロボットの過去と未来から、ロボット教育を考える」
坂本氏の講演の後、牛尾誠夫学長をパネリストに加え、座談会を行なった。司会進行役の二井見博文准教授がロボットの歴史を振り返り、将来のロボットに求めるものをテーマにディスカッションを進め、教育機関としてロボットと教育についてまとめた。以下その模様を掲載する(敬称略)。
 |  |  |
| 牛尾誠夫氏(産業技術短期大学 学長) | 坂本元氏(有限会社はじめ研究所 代表) | 司会進行役の二井見博文氏(産業技術短期大学 機械工学科准教授) |
【二井見】「ロボット」の歴史は古く、紀元前8世紀ホメロスの叙情詩「イーリアス」に登場する「黄金の美少女」までさかのぼることができます。紀元前1世紀には、自動販売機や自動ドアも実際に創られていました。18世紀になるとオルゴールなどの自動人形がヨーロッパでブームになり、日本でも同時期に茶運人形などの機巧圖彙(からくりずい)の図面が残っています。
ロボットという言葉は、1920年にカレル・チャペックが書いた戯曲「R.U.R」の中に登場し、世界各地で上演されました。ロボットを実際に動かす頭脳として必要なコンピュータは、1946年にできた真空管のコンピュータが最初です。そして、1950年にアイザック・アシモフが有名なロボット工学三原則を提唱しました。
1951年、手塚治虫が「鉄腕アトム」の連載を開始。これが、日本のロボット研究者に大きな影響を与えたと言われています。1954年に産業用ロボットが作られ、自動車の組立など大規模な工場で実用化されてきました。
実際の二足歩行ロボットは、1996年ホンダが二足歩行ロボット「P2」を公開。人型のロボットが歩けるということが実証され、そこからヒューマノイドロボットの研究は急速に発展してきたわけです。
それでは、日本における産業用ロボットの活用について、牛尾学長にお話を伺いたいです。
 |  |  |
| ロボットの歴史(1) | ロボットの歴史(2) | ロボット歴史(3) |
【牛尾】ロボット元年は1980年と言われています。以来、日本では溶接用ロボットが早い時期に製造現場に導入され、産業用ロボットが隆盛を極めました。世界で稼働している溶接用ロボットのうち99%が日本で稼働しているという時代もあったのです。TVのニュースで自動車産業を紹介する時には、必ずずらりと並んだ溶接ロボットが出てきますね。
産業用ロボットはヒューマノイドロボットとは違い、動く時にそれほどバランス等は考えなくてすみます。本体を重くして、腕だけが軽くて対象に向かってきちんと動作できればいい。歩行ロボットのように、全身のバランスを考える必要はなかったわけです。
しかし、対象にきっちりと肉薄する必要がある。モノを見る、感じる。触れる、距離を測るといったセンサ技術を必須として、産業用ロボットもどんどん発展してきました。ヒューマノイドロボットも、今後同様に適応していくでしょう。その場合、各部品はサイズが小さく高性能化していくでしょうね。
製造業が発展するためには、産業用ロボットが必須でした。3K職場から人を解放するために役立ってきました。坂本先生も本校で、ヒューマノイド系ロボットを中心に授業や技術を紹介し教育をしていくわけですが、同時に、産業用ロボットの教育も忘れないで欲しいと思っています。
【二井見】産業用ロボットは、今でも社会の中で重要な位置を占めているということですね。では、坂本さんにフィクションから得るモチベーションについて、お話を聞かせていただきたいと思います。
【坂本】二足歩行ロボットが活躍する社会は漫画の世界だけだと言う人もいるかもしれないけれど、新しい技術は誰かが考えて「これをやりたい」と思ったから始ります。偶然、二足歩行ロボットができるわけではありません。ぼくはたまたま、子どもの時にいろいろなロボットアニメを見てきて、一番感動したのがガンダムでした。それが仕事のモチベーションになっています。ガンダムは胸にコックピットがあって、そこに搭乗して操縦するというロボットです。世代によっては、鉄腕アトムのような自律型のロボットを究極のロボットとして研究している人も多くいます。どんな新技術もは夢物語から始まって、具現化していくと思っています。
【二井見】私は、ガンダムの中ではザクの方が好きですね。大量生産という産業の上に乗っている点に感動を覚えました。
次の話題ですが、未来に求めるものとして、キーワードは万能型のヒューマノイドロボット、レスキューロボット、少子高齢化に向けた福祉ロボットが考えられます。坂本さんに、将来ヒューマノイドロボットに何をしてほしいか、未来の話を伺いたいです。
【坂本】期待することはたくさんありますね。例えば、日常生活のサポートをしてほしい。大阪大学で石黒教授が自分そっくりなロボットを作っていますが、自分の代わりに講義をして欲しですよね(笑)。将来はそういう世の中になっていくのかなぁと思います。
【二井見】「黄金の美少女」というのも、作業を手伝ってもらいたい、自分がラクがしたいという発想が元々ありますので、それを追求していくということですね。学長には、少子高齢化社会が進んで行く中で、福祉ロボトはどういう位置づけになるのかという点についてコメントがいただきたいです。
【牛尾】先ほど述べた産業用ロボットは、もっとも原初的なロボットです。ところがヒューマノイドロボットは、ロボットが自ら動き人間との関わりを求めるという、はるかに高度な期待を掛けられています。もし、完璧な講義をやってくれるロボットがいたら、人間はなんなの? ということになりますね。ロボットが果たして人間に代わりうるものにあるのか? ということを突き詰めていくと、人間とは? 工学とは? モノを作るとは? という本質に迫ることになるわけです。
私の個人的な興味としては、ロボット工学の面白さはその辺りにあると思っています。もちろん、役に立つロボットを作ろうという気持ちはあり、福祉ロボットは近未来的に役立つロボットだと考えています。
【二井見】ありがとうございました。次はロボットと教育について意見を伺いたいです。私は授業でヒューマノイドロボットを使って、学生に「起き上がり動作を考える」という課題を出したことがあります。これは、普段何気なく見過ごしている人間の体や動きを見直して欲しいという意図を込めた課題です。
すると、学生が面白いモーションを作るわけです。こういうモーションを作るのは、運動神経のいい生徒が非常に上手いですね。自分の体の動きをよく知っているということだと思います。
他にもブロックを組み合わせて、ユニークなロボットを作り創造性を高める授業も行なっています。単に5本の足があるだけのロボットを作ったチームがあり、こんなのが歩くのかなと思っていると、一生懸命作って行進をさせていました。
 |  |  |
| 【動画】ロボットのダイナミックな動き | 【動画】大股の歩行モーション | ブロックを組み立ててオリジナルロボットを作成する |
教育面では、ロボットコンテストが有効であるということで、本校はロボカップやレスキューロボットなどにも参加しています。NHKロボコンや、小学生や中学生向けにはファーストレゴリーグというレゴを使ったコンテストなどもあります。ロボット学会にも「ロボット感動教育」研究専門委員会が立ち上がっており、今年3月に第1回ロボット感動教育シンポジウムが開催されました。こうしたロボット教育の面白さや有効性を坂本さんに伺いたいです。
【坂本】ロボットは進歩が早いので、今あるロボットを真似してつくるだけではなく、自分の創造性を活かして世の中にないようなものをアイデアを活かして発展させていける分野だと思います。その点が教育的にはいいと考えています。昔のように今までの延長でモノがあればいいという時代ではなくなってきています。ロボット教育を通じて、新しいものを作り出す能力を育成していきたいですね。
【二井見】我々が子どもの頃は、おもちゃを自分で作るという経験をしてきました。しかし、最近はゲームのボタンを押す経験は豊かでも、物を作る経験が不足していますね。最初は真似であっても、ロボットを作るという機会は教育的効果が高いと思います。
ロボットは、機械+電気+情報と工学の3分野が集約していますが、その点について学長からコメントがいただけますか。
【牛尾】ロボットは極めて高度な最終的な制御機械ですから、研究と教育の宝庫だと思います。地味だけれど面白そうなテーマはいくつもある。昔から、先端的にやっていた学者がいたことを覚えています。
【二井見】過去と未来、教育の3つの視点からロボットについて考えてきました。フィクションは夢の話。そのフィクションを現実世界に持ち込むためには、“未来の夢”をしっかり描く必要がありあます。
ヒューマノイドロボットも、昔は空想でしかなかったものが、今は現実に歩いている。夢を実現するためには、人を育て研究を継続していかなくてはなりません。工学そのものに夢があり、夢を実現する一歩手前まできています。坂本先生の「夢はガンダム」もひとつの象徴です。工学をしっかり学んでいけば、人の役に立つロボットを作る面白い世界が広がっていきます。
我々も、夢を叶えるためにやっていきたいですね。
2009/11/9 21:39