「第5回大阪大学“ゆらぎ”プロジェクト東京シンポジウム」レポート
~モデル化できない複雑な対象の制御のカギを「生体ゆらぎ」に求める
9月29日、秋葉原コンベンションホールにて「第5回大阪大学“ゆらぎ”プロジェクト東京シンポジウム 生体ゆらぎの原理とその応用についての徹底討議」が行なわれた。このプロジェクトは正式名称・文部科学省科学技術振興調整費 先端融合領域イノベーション創出拠点の形成「生体ゆらぎに学ぶ知的人工物と情報システム」。生体におけるノイズを利用した「生体ゆらぎ」をナノ、情報システム、ロボット工学などと融合させて生体特有の知的で低エネルギーのシステムを工学的に実現することが目的のプロジェクトだ。
「先端融合領域イノベーション創出拠点の形成」は実施期間は原則10年だが、当初の3年間は拠点の本格化に向けた絞り込みのための期間として位置づけられており、3年目に再審査をして絞り込みを行なうこととなっている。そして2009年1月に文部科学省から再審査結果が発表された。このプロジェクトは「中止」だが「再エントリー可能課題」とされた。なお東京大学「少子高齢社会と人を支えるIRT基盤の創出」も同じ結果となっている。東京・秋葉原で行なわれ200名以上が集まったシンポジウムでは、3名の研究者が研究の現状を講演し、再審査結果を経た新体制について報告した。
大阪大学理事・副学長の西尾章治郎氏は「ゆらぎの利用に焦点をあてて産業化から実用化にいたる真のイノベーション創出ははじめての試み。世界的なリーダーシップを発揮できる高度な人材育成を着々と進めている」と挨拶した。文部科学省科学技術・学術政策局次長の渡辺格氏は「強い影響力を実現するイノベーションを実現しなければ国際競争を勝ち抜けない」と述べた。そして現在の「科学技術振興調整費 先端融合領域イノベーション創出拠点の形成」の現状を語り、再審査されたことで再スタート準備中のこのプロジェクトへの期待と希望を述べた。
 |  |  |
| 大阪大学理事・副学長の西尾章治郎氏 | 文部科学省 科学技術・学術政策局 次長 渡辺格 氏 | 司会を務めた大阪大学大学院生命機能研究科 ナノ生体科学講座 特任准教授 下川哲也氏 |
●複雑なシステムを制御する生体原理
 |
| 大阪大学大学院生命機能研究科 教授 柳田敏雄氏 |
大阪大学大学院生命機能研究科 ナノ生体科学講座 教授の柳田敏雄氏は「複雑なシステムを制御する生体原理」と題して講演した。まず、情報システムを例にして、プロジェクトの概要を説明した。情報処理能力はどんどん上がっているが、エネルギーもどんどん食うようになっている。たとえば現在計画が進められているペタコンピュータの消費電力は神戸市全世帯の消費電力に匹敵する。2020年には消費電力の半分は情報処理に使われるようになるという予測もある。パラダイムシフトが求められている。
人間の脳は1ワット程度しか使わない。大脳は140億の神経細胞を持ち、数十兆のネットワークを持つが非常に省エネである。分子機械の代表的な例は、筋肉のモータータンパク質である。レールになっているアクチンフィラメントの上をミオシン分子モータが滑って動いていく。1億分の1mの世界だが、いまは近接場顕微鏡などによる「1分子イメージング」を使って、動いている姿を実際に見ることができる。またレーザーによる光ピンセットを使って、分子をつかんで動かすこともできるようになっている。
 |  |  |
| 情報処理とエネルギー消費 | 人間の脳は1W程度しか使わない | ミオシン分子モーターの姿を見ることができる |
詳細に調べた結果、ミオシン分子モーターはノイズ(ブラウン運動)を使っていることが分かった。エネルギーをほとんど使っていないということだ。生体の特徴の一つは熱ゆらぎを遮断するのではなく、積極的に利用していることにあり、この点は根本的に人工機械と違う。だが、永久機関ではない。生物はブラウン運動を整流してエネルギーを取り出していることが分かっている。そのランダムな動きから一方向の運動を取り出すところに生物はエネルギーを使っているらしい。柳田氏はこのプロジェクトで「ゆらぎ方程式」と呼んでいる生体システムの方程式を示した。
では分子レベルの上、細胞レベルではどうか。アメーバはcAMPの濃度勾配を作ってやると集まってくる。その細胞内シグナルのネットワークは分かっており、そのなかには運動をon/offするギアにあたる部分がある。それが細胞膜表面に集まっており、その局在がゆらぐことでアメーバはぐにゃぐにゃ動いているのだという。情報処理するたんぱく質の局在がどうしてゆらいでいるのか。それにはエネルギーも必要だ。まっすぐ行くのではなくふらふらしている理由は、誘引物質の濃度勾配方向が突然変化したりしたときには、ゆらいでいないよりは自発ゆらぎがあるほうがより素早く応答することができるのだという。
 |  |  |
| ノイズを使って動く分子モーター | ランダムなブラウン運動から一方向の運動を選択する | ゆらぎ方程式 |
 |  |  |
| アメーバの分子ネットワークの自発ゆらぎ | 自発ゆらぎがあるほうが濃度勾配変化に素早く応答できる | 【動画】シグナル分子のゆらぎによって柔軟な細胞処理が行なえる |
では、脳ではどうだろうか。NICTの村田勉氏による脳が隠し絵の意味を理解する過程、視覚認知における確率的ダイナミクス、ゆらぎの研究を例に柳田氏は解説した。一見、無意味に見える絵をじーっと見ていると、突然、絵の特徴が抽出されて「あ、わかった」と気づくことがある。それに脳のゆらぎが利用されているという。記憶に関係しているといわれる海馬の神経細胞も自発的にゆらいでいるし、脳は刺激がなくても常に自発的にゆらいでいる。生体は「ゆらぎ」によって、自ら取るべき良い状態を探索していると考えられるという。
最適化の指標が低いとゆらぐようになり、探索を始める。アトラクタに落ちると最適化指標が上がってあまりゆらがないようになる。このような仕組みを使うことで、厳密でない制御でも複雑システムの大局的最適化を可能にするので、桁違いに計算量を減らして消費エネルギーを下げることができるのではないかという。
ゆらぎ方程式は簡単だが、だからといって意味が浅いということではないと強調し、現在行なっている研究の例をあげて、複雑情報ネットワークの省エネ安定制御や、複雑なロボットの制御などを低エネルギーで可能になると述べた。ネットワークのルーティングの計算量・消費電力を1/3000に、ロボットのほうはナノ材料による人工筋肉と組み合わせることで、消費電力を1/1000に抑えることができると述べた。
ゆらぎ制御がこれまでのファジィやニューラルネットと違うところは、複雑な事象に対応できること、モデル化しなくていいので未知の対象にも対応できることだと述べて最後に講演をまとめた。
質疑応答では具体的な設計思想などに関する質問が相次いだ。現状のマシンにそのまま「ゆらぎ」の考え方を応用しようというわけではなく、このような発想のもとに新しい機械を設計していこうではないかというのが柳田氏の基本的発想のようだ。
 |  |  |
| 脳が意味を理解する過程にもゆらぎがあるという | ゆらぎによって探索を行なうことで柔軟な視覚認知が可能になるという | ゆらぎによる探索の考え方 |
●ゆらぎでロバストな情報ネットワーク
 |
| 大阪大学大学院情報科学研究科 教授 村田正幸氏 |
大阪大学大学院情報科学研究科教授の村田正幸氏は「ゆらぎでロバストな情報ネットワーク」と題して、何がイノベーションなのか、なぜゆらぎ概念が必要なのか、そして研究成果としてセンサーネットワークアーキテクチャ、仮想化光ネットワーク、TCP Symbiosis、ゆらぎ制御のハードウェアによる実現などについて、柳田氏の講演後の会場からの質疑にもいくつか答えながら講演した。
ネットワークでは、ゆらぎ方程式における「アトラクタを持つ制御構造」は各階層における制御プロトコルの動作、「アクティビティ」はシステム遅延、スループット、信頼性になる。「ゆらぎ」はアクティビティに応じてある程度変化させたほうが良いのかもしれないが、どのように設計するかはまた別途研究をしているという。
ネットワークには送信側と受信側があり、その間にいくつかのルートがあり、それを選択しなければならない。そこにゆらぎを利用しようというのが村田氏らの研究だ。今の場合はパケットの遅延がもっとも少ないようなルートを選ぶようにしている。負荷変動に適応的に一番良いパスを選ぶことができ、ルーターが故障した場合、別の経路に切り替えることができるという。
従来のネットワーク制御はif-then-else型、すなわち、どこかのノードが故障したら別のパスに切り替えるべし、といったことをすべて書き下して行なっている。いわゆるオフライン制御だ。電話網はこのような仕組みで作られている。いっぽうインターネットはオンライン制御で、最適化問題として定式化してそれを解くという手法で制御されている。ただし、最適化問題を解くその間は、環境が変化しないことを大前提としている。環境変動が激しい環境には適応できない。発見的手法などを使っても同じで、そのためいかに短時間で問題を解くかがカギになっている。また情報量がすぐに爆発することも問題だ。
まとめると、オフライン制御は最初に経路を決め、何か事象が発生したら経路を手順にしたがって変更する。オンライン制御は情報収集しながら経路を再構築していく。現状では故障が発生したら急いで情報収集して経路を再構築する。情報が爆発すると対応できず故障が増えてしまう。
それに対してアトラクタ選択モデルに基づくルーティングは、もともと時間発展方程式として記述されており、自律的に情報収集し、自律的に経路を再構築していき、故障を素早く回避して負荷変動などの環境変動に素早く対応できる。そこがこれまでのやり方とは全く違うという。
 |  |
| ゆらぎ方程式から情報システムへの展開 | ゆらぎを利用したネットワークのルーティング制御 |
 |  |
| 従来の手法の特徴 | アトラクタ選択モデルに基づくルーティングと既存の方法の比較 |
インターネットはIPの上で動いており、アプリケーションなど各々が階層構造をなしている。ところが最近は多くのプロトコルが乗っかってきた。これまではシンプルであるがゆえに成功してきたが、現状は必ずしもシンプルではなくなっている。NICTなどで新しいネットワークアーキテクチャをつくろうという動きがあるのはそのような背景がある。そのなかに、ゆらぎプロジェクトの考え方を入れたアーキテクチャを提案していきたいと考えているという。
 |  |  |
| IPの現状。かつてはシンプルだったが今は複雑に | 新世代ネットワーク構築の取り組みが始まっている | ゆらぎに基づくネットワークアーキテクチャを提案しようとしているという |
研究成果の一つとして村田氏は光ネットワークの仮想化の研究を示した。今は物理的なネットワークの上に多重に信号を流すことができるが(WDM)、それを動的にトポロジー制御することでうまく制御しようというものだ。遺伝子・代謝ネットワークの考え方をトラフィック制御に応用して安定化させることができるのではないかと考えており、シミュレーション実験したところ、急激なトラフィック変動にも適応でき、ノードが落ちても対応できることが分かったという。今後、10月からNTTの社内実験用ネットーワークで実証実験を行ない、その後、広域実験を行なう予定だ。
ゆらぎを用いたセンサー・ネットワークの制御にも取り組んでいる。センサーネットワークによってクラスタリングがあり階層がある。その上でルーティングを行なう。動作周期の異なる無線センサーネットワークの上に情報収集のためのオーバーレイ・ネットワークを構築する。ゆらぎ制御によるトポロジー制御でネットワークを安定して動かす。
ソフトウェアによるゆらぎ処理だけではなく、ゆらぎの構造を埋め込んだプロセッサも研究開発されている。現在は遺伝子・代謝反応ネットワークの関係を記述したものをFPGAで実装しており、デモアプリを動かしている段階だ。将来的にはチップ化を目指す。ソフトウェアで書くのに対して1/1000くらいの処理速度になり、消費電力も大幅に下がるという。
 |  |  |
| NTTと共同研究中のゆらぎに基づく光仮想ネットワーク | ゆらぎ制御のトラフィックエンジニアリング | 【動画】ゆらぎ制御に基づくトラフィック制御のデモ。 |
 |  |  |
| 実証実験予定 | ゆらぎプロセッサ | 【動画】ゆらぎ構造を埋め込んだFPGAによるデモアプリ動作の様子 |
●ゆらぎで複雑なロボットを制御する
 |
| 大阪大学大学院基礎工学研究科教授 石黒浩氏 |
大阪大学大学院基礎工学研究科教授 石黒浩氏は「ゆらぎで複雑なロボットを制御する」と題して講演した。石黒氏はまずプロジェクト開始時を振り返り、ロボットの問題は「モデル化」が困難な世界で行動することが難しい点にあると述べた。モデル化できるのであれば、なんとかして解けばいい。だが非線形な特性を持つ空圧アクチュエーターを組み合わせたロボット自体の行動もうまくモデル化できないし、環境全体をモデル化することもできない。人と関わるといっても人そのものがモデル化されていない。そういうところに目をつぶり、非常に限られた領域で問題を解いていた状態のところに、ゆらぎのプロジェクトが始まったのだという。
「ゆらぎ方程式」の意味についても、1年間くらい議論したという。「アクティビティ」と「ノイズ」が入っていることによって、モデルがドミナントになったり、ノイズがドミナントになったりするのが「ゆらぎ方程式」の特徴だ。モデルに幅を持たせるためにノイズをちょっと入れるのではなく、ノイズを積極的に制御することでロボットの適応性を高めていくことが非常に重要になると考えたのだという。
ではアクティビティをどう設計するのか。従来の制御問題は、問題空間上の真の目的関数を最小化することだと捉えられる。だが「真の目的関数」はわからないので、従来の制御方法ではモデルベースに近似目的関数に求めて制御を実行する。だが外乱のある環境にロボットがおかれるとモデル化は崩れてしまう。作ったモデルに従うと間違ったローカル最適解に落ちてしまう。そこで「ゆらぎ方程式」を利用することでモデル化が不完全にしか行なえない複雑な問題を解こうというのが石黒氏らの立場である。
では、「アクティビティ」はどこから持ってくるのか。モデル化が間違っているかもしれないので、そこでパラメーターを探しても仕方がない。アクティビティはモデルとは独立でなければならない。具体的には制御系とは独立に計測したパラメーター(例えばビジョンなどの解)が、真の目的関数に近いかどうか判断するものがアクティビティであると考えたのだという。だが、何かモデルがないと初期値の設定もできない。腕ロボットに関しては適当に一定間隔でもローカルミニマムを持つようなモデルを作り、いったんゆらぎ制御で問題を解くようにした。いったん学習すると、その経験をもとに、初期値とモデルを変えて、より効率よく解を探すようにした。
たとえば昆虫のような人工生命を考える。餌からにおいが出ていて、それをセンシングしてアクティビティとする。もっとも単純でロバストな戦略は、においが薄いときは、たくさん大きくランダムに動く。餌に近づくとにおいが強くなるので、そうするとランダムさを少し小さくする。そうするとさらににおいに近づく、するとさらにランダムに動く大きさを小さくする。それだけで昆虫ロボットは餌に近づいていくことができる。この原理でロボットを作り、一つのモーターと光センサーで目標に到達できるロボット、また音源に近づいていく機能などを実装して確認した。きっちり観測を行ない真っ直ぐに目標に到達する制御に比べれば効率は悪いが、目標は達成することができた。
 |  |  |
| 複雑でモデル化できないことがロボットの問題 | 従来の制御手法の問題 | ゆらぎ制御 |
 |  |  |
| アクティビティは独立したところから持ってくる | ゆらぎ方程式の解釈 | ゆらぎ探索 |
 |  | 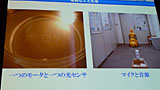 |
| ゆらぎと他の制御技術との違い | 昆虫ロボット | 【動画】光や音源に近づくロボットに実装した例 |
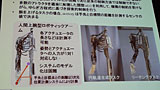
26本の人工筋肉を持ったロボティックアームの実験も同じ考え方だ。DCサーボモーターではなくマッキベン型の人工筋肉を用いており、骨にはワイヤーで関節をまたいでついている。姿勢とアクチュエータへの入力は1:1対応しない。それでもノイズベースに制御を行なうと、目標に腕を近づけたり、円軌道を描かせることができた。石黒氏は、赤ん坊も同じような探索・行動パターンの獲得学習をしているのではないかと述べた。また「身体の構造そのものが生存のためにうまく制約をかけているのではないか」と述べ、その構造的制約をうまく発見しながら生きているのだろうと考えを語った。アクチュエーターを動かしやすい姿勢と動かしにくい姿勢をノイズを使って探ることで、その結果を利用するといったやり方もできるのではないかという。
物体に手を伸ばすだけなら単純だが、実際の問題はもっと複雑である。それは階層化することで解決できるのではないかと述べた。上位層が下位層のアクティビティを決定していくといった考え方だ。ただまだきっちりと定式化はされていない。今後はより効率を上げるようにノイズの種類や、アクティビティとノイズの関係を探ったり、探索結果の再利用(学習)、ノイズによるモデル化、ゆらぎと従来手法のハイブリッド制御の方法を探っていく。シャープ株式会社とねじ締め探索や、パナソニック株式会社、三菱重工業株式会社と家庭用・日常活動用ロボットシステムの開発、電磁式リニアアクチュエータなどの開発を行なっているという。講演の最後には、「ゆらぎ」で、より人間に近いロボットができるのではないかと夢を述べた。
Q&Aで石黒氏はアニーリングによる最適化手法との違いについて改めて強調した。ランドスケープをノイズの大きさで制御しながら局所最適解に持っていくところは同じだが、そもそも「ゆらぎ」の場合は、与えられたパラメータ空間とは異なる、独立したところからアクティビティを持ってくるところが全く異なり、最初からモデル化できないものを処理しようとしているところが違うのだという。
 |  |  |
| ゆらぎを利用した多自由度アーム | 【動画】人工筋肉を使った複雑構造のアームのゆらぎ制御のデモ動画 | 将来は階層化する |
 |  |  |
| シャープと共同開発中の生産ラインでのネジ絞めロボット | パナソニック、三菱重工業と家庭用・日常活動用ロボットシステムを共同開発中 | ヒューマノイドロボットの動作生成にも応用 |
 |  |  |
| 【動画】電磁式リニアアクチュエータのデモ動画 | ノイズの種類によって効率性も異なる | より人間に近いロボット実現をゆらぎで |
●ゆらぎプロジェクトの新研究体制
最後に「ゆらぎプロジェクトの新研究体制」について石黒浩氏が4年間を振り返って、今後について語った。部局単位の研究開発ではなく、出口単位でいろいろな部局のメンバーが参加するという体制でここ2年は課題に取り組んできたという。だが昨年の再審査でこのプロジェクトは凍結となった。その反省を活かして、もともと16の民間企業と研究を行なっていたが、出口イメージがはっきりした少数企業で取り組んだほうが良いのではないかと考え、現在は6社の企業と具体的な研究成果を短期間であげようと現在取り組んでいる。その後、段階的に他の9社やそれ以外の会社と共同研究を進めていく体制を作っていきたいと考えているという。
石黒氏は「ゆらぎ」プロジェクトは研究領域を超えた革新的基本概念であり、研究領域間の境界を取り除いた融合研究で、実用化を支える幅広い応用分野もあるので、本当のイノベーションを目指す先端融合領域にふさわしい研究だと考えていると語った。学生たちの活躍の場所としてもプロジェクトを位置づけており、「大阪大学の中核プロジェクトとなるよう今後も取り組んでいく」と抱負を述べた。
 |  |  |
| ゆらぎプロジェクト概要 | 実用性の高い研究を行なう予定 | 平成21年度からの研究開発体制 |
 |  |  |
| 直近の実用化を目指す | 人材教育も行なう | 大阪大学の中核プロジェクトを目指す |
 |
| 大阪大学産業科学研究所教授 川合知二氏 |
この後、ナノテク研究で知られる大阪大学産業科学研究所教授の川合知二氏が「『ゆらぎ』プロジェクトの方向は非常に大きなイノベーションを起こすと確信している。エネルギー問題で困ることは目に見えており、自然の摂理を利用した原理の応用はきわめて自然で理にかなっているからだ。これは素性の良い科学技術で、いまちょうど離陸し始めているところ。これから急激に応用例が増えていくと思う。今後のエレクトロニクスやシステムを発展させていく上での『キーテクノロジー』であるという信念が我々にはある。今後、プロジェクトが成功し、この考え方と技術が浸透し、現実に使われるようになる。これまでのシリコンテクノロジーとゆらぎ技術が混ざった形で浸透していくと思う。我々もそういった方向への努力を行っていくが、皆さんにもぜひ応援していただきたい」と閉会の挨拶を述べて、シンポジウム全体を締めくくった。
2009/9/30 17:32