「第3回水中ロボットフェスティバル」レポート
~自律型水中ロボットがめざましい進化
 |
| 会場の海上自衛隊阪神基地隊 屋内プール。たくさんの観客が来場した |
2009年5月31日(日)に、神戸市の海上自衛隊阪神基地隊屋内プールにおいて、「第3回水中ロボットフェスティバル」が開催された。主催は水中ロボコン推進会議、Marine Technology Society(MTS)日本支部、IEEE/OES(Oceanic Engineering Society)日本支部、社団法人日本船舶海洋工学会。
地球上の表面は7割が水に覆われている。その広大な海洋の調査研究は、地球資源を有効活用する上でも、地球環境を守る観点からも重要な課題だ。しかし、水中では人が活動することも機械の遠隔操縦も難しい。そこでRT(ロボットテクノロジー)の活用に期待が掛かっている。
水中ロボコン推進会議は、水中ロボット技術を研究する重要性と楽しさを社会に広くアピールし、技術者のネットワークを形成することを目的に2007年に設立された。水中ロボット競技会や展示会を定期的に開催し、水中技術に関心を持つ人達の裾野を広げる活動を行なっている。
今回は、神戸市の海上自衛隊阪神基地隊が協調的広報活動の一環として、日頃隊員が訓練に使用している50mプールをイベント会場に提供した。イベントに合わせて掃海艇「くめじま」の一般公開も行なわれ、多くの来場者が見学した。
前回までは、自律型水中ロボット(AUV部門)でミッションをクリアするロボットがいなかったが、今大会では、複数のロボットがゴールし観客から拍手が湧いた。めざましい進化を実感したAUV部門を中心にレポートをする。
 |  |  |
| 海上自衛隊阪神基地隊 | 「第3回水中ロボットフェスティバル」参加者 | AUV部門に出場したロボット |
●画像センサーでライントレースを成功した「AUV(自律型水中ロボット)部門」
AUV(Autonomous Underwater Vehicle)部門のロボットは、ロボット本体にバッテリ、マイコンを搭載し、センサー情報をもとに水中を自律で移動し探索する。
今大会の競技は3ステージあった。1つ目はゲートステージ。これはプール内に設置した2本のポール間(ゲートと呼ぶ)を3つ連続で通過するもの。スタート地点の正面に第1ゲート、2m離れた斜め前方に第2ゲートがあり、第3ゲートは第1ゲートから4mの位置に垂直に設置されている。屋内プールでは鉄筋の影響で方位センサーが誤動作するため、どのチームもタイマーでロボットを制御してゴールを目指していた。
2つ目のステージは、いわゆるライントレースだ。プールの底に幅5cmの赤いテープで、直線・カーブ・L字のコースが描かれた。ライントレースはロボットコンテストではよくある課題だ。しかし陸上で車輪型ロボットがトレースするのと、水中ロボットが行なうのとでは難易度が格段に違う。通常のライントレースは、外乱によるセンサーの誤動作を防ぐため、センサーをラインに近づけ遮光などの工夫をする。しかし、水中ロボットの場合は、深度1.8mあるプールの底に描かれたラインをセンシングしなくてはならない。テスト環境と深度が違えば、センサーが取得するラインの太さも色も違ってくる。
また、ロボットの移動によって水流が生じる中で、姿勢制御をする技術も必要だ。このステージでは、タイマー制御等のキメ打ちでロボットのコースをプログラムした場合は、減点対象となる。一番、自律度が問われる競技だった。
3つ目は、ボーナスステージでロボットを用いたデモンストレーションで、技術やオリジナリティをアピールする。
出場したのは、九州工業大学から「DaryaBird」と「Twin-Burger」「MiniTB」「AquaBox III」の4台、そして東京海洋大学の「KOLABOT」、東京大学「HALウラボ」の計6台だった。
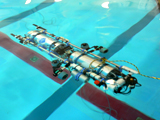
「DaryaBird」は、45×108cm(幅×奥行き)、重量31kgのコンパクトなロボットだ。これまで九州工業大学の石井研究室が開発してきた水中ロボットのノウハウが凝縮されているという。
電源、センサー、PC等の機能をモジュール化し、開発効率やメンテナンス性をアップした。センサーは、方位センサー、ジャイロセンサー、傾斜センサー、圧力センサーのほか、プロペラの回転数で速度と位置を検出する流速センサーを搭載。シンプルで安価なセンサーを組み合わせ、ロボットの正確な位置を計算で出している。
前方には、ネットワークカメラを搭載。水中で監視や調査をするためには、対象物から少し距離をおいてカメラをパンチルトでズームしたり、角度を変えたりする方が効率がよいため採用したそうだ。
会場は磁場の関係で方位センサーが誤動作するため、ゲートステージはタイマーで「DaryaBird」の進行方向を制御しクリアした。
ライントラッキングステージは、カメラで赤いラインを捉え見事なスピードで進んでいった。他のロボットがジリジリとした速度でラインをトレースしていただけに、「DaryaBird」の速度に参加者も観客も驚いていた。
「DaryaBird」は環境調査、監視、掃除等に活用することを目的に製作。例えばタンカーは船艇に貝が付着するとアルミが溶けて腐敗するそうだ。「DaryaBird」にブラシを搭載し、船艇清掃作業をさせたいと具体的な目標を掲げている。
 |  |  |
| 「DaryaBird」(九州工業大学 石井研究室)。サイズは45×108cm(同)、重量31kg | 【動画】ゲートステージはタイマー制御で確実にクリア | 【動画】「DaryaBird」のライントレース。スピードが段違いに速かった |
 |  |  |
| 【動画】難所のL字カーブもスムーズにクリアした | 「DaryaBird」のコントロール画面 | 【動画】「Twin-Burger」。サイズは、86×154×54cm(幅×奥行き×高さ)、総重量120kgと大会最大。左端下部に搭載したカメラでラインをトレースしている |
 |  | |
| 【動画】「MiniTB」。サイズ19×36×16cm(同)、重量約2kg。最軽量のため、水流の影響でまっすぐ進むのが難しい | 【動画】「AquaBox III」。60×170×31cm(同)、重量40kg。超音波センサーを新たに追加した |
東京大学の浦研究室が製作した「HALウラボ」は、手軽な加工で安価に製作し水中ロボットプラットホームとして活用したいという意図で開発している。センサーは、音波レンジセンサー×4、方位センサー、カメラを前方と下方に搭載。CPUは、Pi-BOXをメインにしH8マイコンを通信用に使っている。
ロボットを水中内で稼動させるためには、基板やモーターが水に濡れないような精密加工が必要となる。また、水中用センサーは高価だ。こうした問題を解決するために、モーターには、入手しやすいラジコン用のブラシレスDCモーターを採用している。メンテナンスをすれば、水中で稼動させても大丈夫なため、モーターは本体の外に出してある。
水深約10mまでの耐圧性能をもつ本体容器は、アクリル材の半球や円筒、ドーナッツ状の円盤を貼り合わせて製作。従来必要とされる高度な加工技術を必要としないため、個人レベルの手作りが可能。こうした工夫により製作費を35万円に抑えることができたという。製作時間は、2~3人で100時間。
同チームは、水中ロボットHALウラボでロボットの構造や作り方を公開している。
ゲートステージにチャレンジした「HALウラボ」は、第1ゲートをくぐったあとに大きく右に逸れてしまった。このままリタイアか……と思ったところで、方向転換。うまい具合に第2ゲートを通り抜け、第3ゲートに向かった。第3ゲートの左側のポールにぶつかり、ポールに絡んでぐるっと旋回してギリギリのゴールとなった。走行順が1番のHALウラボが、自律競技ミッションクリアの第1号ロボットとなった。
ライントレースは、移動スピードをかなり落として慎重にトレースしてゴールしていた。ボーナスステージでは、オレンジのボールを追いかけて移動するデモンストレーションを行なった。
 |  | 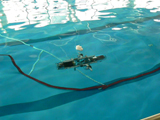 |
| 「HALウラボ」(東京大学 浦研究室)。サイズは53×80cm(同)、重量11kg | 【動画】第3ゲートのポールにからみつくようにしてゴールした「HALウラボ」 | 【動画】ゆっくりだがラインにしたがってカーブを進む「HALウラボ」 |
 |  | |
| 【動画】一番難しいL字カーブもクリアして無事にゴールした。メンバーの喜びの声が響いている | 【動画】オレンジのボールを追いかけて移動するデモンストレーション |
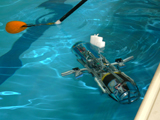
東京海洋大学の近藤研究室が小型テストベットとして開発中の「KOLABOT」は、サイズは40×100×25cm(同)、重量が21kg。スラスターの取り付け方に特長がある。中央左右に搭載したスラスターは、ボディに対して垂直ではなく斜めに角度がついている。これにより橫移動も可能になった。センサーは自作の音波レンジセンサー、磁気センサー、ドップラー速度計。水中では、レーザーやGPSを使えない。そこでドップラー現象を利用し周波数で距離を測る方式がポピュラーだという。前方と下部には、USBカメラが搭載されている。
 |  |  |
| 「KOLABOT」(東京海洋大学 近藤研究室)。サイズは40×100×25cm(同)。重量約21kg | 【動画】コースがずれて第2ゲートは通過できなかったが、第3ゲートをクリアしてゴール | AUV部門出場メンバー |
●ユニークなロボットが出場する「フリースタイル部門」
フリースタイル部門には、ケーブルで遠隔操作するROV(ROV:Remotely Operated Vehicle)が出場し、ロボットの性能をデモンストレーションでアピールした。
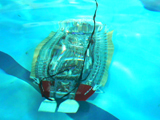
注目を集めていたのは、大阪市立大学工学研究科動力システム工学研究室の魚ロボット達だ。小型魚ロボット「およぎタイ」をより小型化した「FC robofish」が出場した。全長わずか10cmの「FC robofish」がプールでデモンストレーションをしていても、その動きは全く見えない。ということで、メンテナンスブース前に水槽が用意され、待機時間にもデモを実施していた。
同研究室の魚ロボットシリーズは、尾びれを魚そっくりに動かして本物同様に泳ぐ。「およぎタイ」には浮沈装置がないが、新型の「FC robofish」は、ボディの白い部分が浮沈装置になっている。搭載した重りを振り子のように前後に動かし、重心の位置を変えることにより、浮心と重心の位置調整して頭の方向を上下に変えてあたかも魚のように浮沈する。
「FC robofish」は体内にリチウムポリマー電池を搭載している他、エネルギー供給用として外部に自作燃料電池を設置している。浮沈せずに遊泳する場合は消費電力が少ないため、リチウムポリマー電池を充電しながら移動し、浮沈装置使用時には燃料電池とリチウムポリマー両方から電力供給するハイブリッド方式を採っている。今後、改良を重ねより長時間、少ない電力量で稼動することを目指しているという。
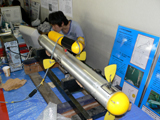
競技には参加しなかったが、参考出品として「RT robofish」の展示・実演も行なわれた。「RT robofish」は、全長27cmとやや大きく、デザインはニジマスをモチーフにしている。名前のRTは、ニジマスの英名Rainbow troutとRobot Technologyを掛けている。将来的には、カメラを搭載しAUV化を目指す。小型で長時間稼動が可能な利点を活かし、配水管などの管内壁チェックや、河川の水質チェック等への活用が見込まれている。
 |  |  |
| 「FC robofish」(大阪市立大学工学研究科動力システム工学研究室)。体長わずか10cm | 【動画】「FC robofish」の尾びれは、バス釣りのルアーを流用している。本物のように自然に動く | 【動画】浮沈装置の重心位置を移動して、泳ぐ「FC robofish」 |
 |  |  |
| 開発中の新魚ロボット「RT robofish」。今後、カメラを搭載して自律化する予定 | 【動画】「RT robofish」のデザインはニジマス。RTはニジマスの英名:Rainbow troutとRobot Technologyを掛けている | 【動画】「およぎタイ」。魚の泳ぎを研究し生まれたロボット。水中ではスクリューよりも尾ひれの方が安全で、推進力として効率がよいという |
大阪大学 船型デザイン領域 戸田研究室の「イカロボット」は、片側17個のサーボモーターを上下に動かし波打つ側ヒレで水流をつくり前後進、その場旋回など6自由度方向の移動をする。前回よりも足ヒレが大きくなり、浮沈する際のスピードがアップしている。外部にでていた重心移動装置をボディ内に納め、従来よりボディがコンパクトになりデザインがすっきりした。本体が薄いため、狭い隙間などの探査に活用が期待される。
 |  |
| 【動画】「イカロボット」(大阪大学 船型デザイン領域 戸田研究室)。サイズ100×150cm(同)。重量50~60kg | 【動画】「イカロボット」の柔らかいヒレの動き。浮沈装置をボディ内に納め、ボディをすっきりさせた |
 |  |
| 【動画】「PLATYPUS」(大阪大学 海事機械システム工学領域 加藤研究室)。サイズは、全長136cm、重量14.5kg 。4つのひれを動かし、前後進、左右の方向転換を行なっている | 【動画】主翼独立制御型水中グライダーの「ALEX」(大阪府立大学有馬研究室)。ボディ内蔵のシリンダーの動きと羽の角度が連動して揚力を推進力に変えている |
今回は、神戸市立高専と奈良高専の学生が、自作の魚型ロボットでライントレースに挑戦した。学生達は5月16日に大阪大学で開催された水中ロボット工作教室で、工作及び制御プログラムを学んだ。各自2週間かけてロボットの調整を行ない、前方に搭載されたUSBカメラでラインを捉えてトレースした。ボディ内部に水が入り、苦戦しているチームが多かったようだ。
奈良高専Bチームは、本体の周囲をシリコンゴムで覆って防水加工した上、濡れては困る基板や電池を外部に出すなどの工夫をしていた。
 |  |  |
| 魚型ロボット。尾びれのモーター1つで泳ぐ。前方の半球内にカメラを搭載している | 【動画】防水加工を施した奈良高専Bチームが優勝した | JMSSのラジコン型潜水艦も多数出展された |
●掃海艇「くめじま」一般公開
掃海艇「くめじま」は、大陸棚程度の水深までに敷設された機雷の捜索及び処分を行なう中型掃海艇。機雷のタイプに応じて新型の機雷処分具や機雷探知機、サイドスキャンソナー等を用い、複合掃海を行なう。新型機雷処分具「S-7」は前方に超音波水中映像装置とカメラ、マジックハンド式のマニピュレーターを搭載している。
昼休みには、来場者や競技会参加者が船内を見学していた。
 |  |  |
| 一般公開された掃海艇「くめじま」 | 掃海艇「くめじま」。9.4×57.7×4.2m(同) 基準排水量490t 速力14ノット | 「くめじま」20mm機関砲 |
 |  |  |
| 機雷処分具S-7 | 磁掃ケーブル。海中で磁場を発生し、機雷を爆破させる | 機雷処分具の操縦桿 |
2009/6/5 16:46