日本科学未来館で実施中の「ロボットOSプロジェクトツアー」同行レポート
~普段は入れない研究室でロボットと研究者に会える人気研究棟ツアー
日本科学未来館では、毎月土曜日、普段は一般来場者が入ることのできない同館にある研究開発施設を訪問できる「研究棟ツアー」というイベントを実施している。定員は10~15名で、最先端の研究プロジェクトについて科学コミュニケーター・ボランティアや研究者が、実際に研究中のものを前に紹介・解説してくれるという内容だ。
4月からは同イベントの新企画がスタートし、その中の1つが「ロボットOS(オペレーティングシステム)プロジェクトツアー」。毎月第2・4土曜日の11時30分から12時15分まで行なわれ、2回目の開催となった4月25日に、一般参加者の方たちと共に同館3階にある研究施設を訪問させてもらった。解説は、日本科学未来館の裏手にある産業技術総合研究所(以下産総研)デジタルヒューマン研究センターで副センター長を務め、ヒューマノイドインタラクションチームを率いる工学博士の加賀美聡氏らが担当。同センターで研究開発中のロボット用OSやロボットについて、話を伺うことができた。その模様をお届けする。
 |  |  |
| 普段は入れない日本科学未来館3階の研究施設を舞台にツアーが行なわれた | 解説を行なった工学博士の加賀美聡氏 | ツアーの最初は、科学ボランティアによる簡単な解説が行なわれる |
●ロボットOSプロジェクトとは?
ロボットOSプロジェクトとは、「ヒューマノイド(型ロボット)のための実時間分散型情報処理」というより大きなプロジェクトの中の重要な柱の1つだ。現在、すでに最先端のロボットはその機能の一部を実現しつつあるが、次世代のヒューマノイド(ヒューマノイド型以外も含まれるが)ロボットは、視覚や聴覚などさまざまなセンサーを使って環境を認識する能力、複雑な行動を計画して実行する機能、何かに押されたりぶつかったり足が滑ったりしても人などの動物のように即座に対応できる柔軟性、長時間安定して稼動するための省電力性、そして耐故障性などが求められている。しかし、現状のように1つか、多くてもせいぜい片手で数えられる程度のプロセッサが中央で集中する形でロボットのすべてを制御する仕組みでは限界がある。数十の異なる計算や制御をこなそうとすれば外乱に対して柔軟に即応できないために計算能力の拡張が困難になるし、センサーやモータへの信号線が長くなるために信頼性が低下するし、プロセッサの消費電力だけで200Wを超えてしまいもする(人間の脳はもっと優秀なのに、たった20W程度しかエネルギーを消費していないそうだ)。要求される性能をすべて実現しようとするには、さまざまな問題が出てしまうのである。
そうした問題を解決する手段として、「ヒューマノイドのための実時間分散型情報処理」プロジェクトでは、多数の処理を関節やセンサーなど全身に配置した多数のプロセッサで分散制御する方式が研究されている。即応性・柔軟性の面では、個々のプロセッサは自分の受け持つ制御だけに集中して処理するのでさらに向上させることができる。その一方で、大きな処理能力を必要とする時でも、力を合わせれば対応することが可能だ。また、各プロセッサは必要な計算だけを受け持つので、消費電力を減らせるというメリットも有する。さらに、多数の信号線を1本のネットワークに置き換えることで、信頼性の向上も図れるといいことずくめ。先に挙げた次世代のヒューマノイド・ロボットの実現も、より具体的になるというわけである。そこで最も重要な課題となるが、多数のプロセッサが多量の情報を送受信し、同期を取りながら制御を行なっていく実時間処理を行なえるシステムの実現だ。その柱の1つが、実時間処理を行なえるOSの開発なのである。
●プロジェクトの3本柱の1つが実時間処理を行なえるOSの開発
「ヒューマノイドのための実時間分散型情報処理」プロジェクトの目的をもう少し具体的に述べると、以下の通りとなる。
・入力されてから処理するまでの遅延時間を1/1,000秒以下に抑えた実時間処理
・低電力化により600Whのバッテリで2時間の連続可動
・視覚、聴覚、触覚などの複合的な認識処理と、環境と干渉しない歩行経路、全身動作(30自由度)の行動計画
・多くの信号線、物理的衝撃の中で高い安全性の確保
これらの目的を達成するための具体的に研究されているのが、先に挙げた実時間処理を行なえるOSの開発を含めた以下の3つのテーマだ。
・実時間分散協調処理可能なプロセッサ(RMTP)の開発
・実時間OSの実装
・ロボットプログラムの実装
実時間分散協調処理が可能なRMTP(Responsive Multi-Threaded Processor)は、8つのプログラムを同時に実行することが可能で、プロセッサ間で交換される情報の重要性に応じた電送速度の制御も可能という特徴を持つ(2003年から2008年にかけて、慶應大学の山崎研究室が開発した)。実時間OSは、1/1,000秒以下の即応性やソフトウェアが要求する時間制約を保証することを可能としている。後述するが、フリーのOSであるLinuxをベースに「ART-Linux」として開発中だ(より正確な表現をすれば、Linuxに必要な機能を持たせるパッチの開発を行なっている)。
その最新版として、Linux 2.6ベースのART-Linux 2.6が3月に公開。これには予定している機能がすべて盛り込まれているわけではないので、それらを追加すべくさらに開発中だ。そして最後の実装については、従来から培ってきたヒューマノイド・ロボットの動作を実時間分散OS上で実行し、認識、動作計画、モータなどの各処理の中から並列性を抽出し、多数のスレッド、多数のプロセッサ上で分散して処理することで、従来の何倍もの即応性、柔軟性、連続的な動作を実現するとしている。
目標とする機能がすべて実現した場合のヒューマノイド・ロボットは、以下のような機能を有したものになるという。まず1つ目は、バランスの良さと柔軟性、即応性。具体的には、デコボコの地面の形状を把握しつつ歩行を行なえ、急に押されても倒れず、転がるボールを蹴り返すといった動作が実現される。人間なら小学校に上がる前の幼児ですら行なえる動作だが、自律型のヒューマノイド・ロボットにとっては、まだまだ行なうのが難しいものが多いのはRobot Watchの読者ならご存知のことだろう。
2つ目も移動関連だが、障害物を回避したり手で取り除いたりしながら、最適な姿勢を選択し、長い距離を安定して歩行するというもの。これまた人なら当たり前というわけだが、障害物回避はまだしも、「手で障害物を排除しつつ、最適な姿勢を維持して長距離を移動する」などとなると、もう画期的としかいいようがない。そして3つ目は実現するとさらにすごいロボットになる。対象物や環境を観測して認識し、人とコミュニケーションを取りながら協調して作業をするという具合だ。これらを実現するために必要な3要素の1つが、今回のツアー内容で扱っているOSというわけだ。続いては、開発中の独自OSのART-Linuxについて解説しよう。
●日本のヒューマノイド・ロボットに多数搭載されているOS「ART-Linux」
Robot Watchの読者の方なら、OSがどういうものであるか大多数の方がご存知のことと思う。少なくとも、「PC用のOSにはWindowsやMacOS、Linuxなどがある」「PCやゲーム機のようなハードウェアと、ワープロやゲームなどのソフトウェアの間を仲立ちする、基本中の基本となるソフトウェア」などといった形で理解されているのではないだろうか。近年は家電などにも入っているし、車両運動制御など各種インテリジェント化が進むクルマもしかり。アニメ「機動戦士ガンダムSEED」シリーズで、主人公らの乗るガンダム系のモビルスーツに略称「GUNDAM」という名のOSが搭載されていたのを覚えている方もいることだろう。とにかく、複雑な動作や作業を行なえる優秀な機能を持ったプロセッサを搭載している機械には、OSが必ず載っていると思っていただいてまず間違いない。当然、複雑な動作の極みともいえるロボットもしかりで、加賀美氏らは20世紀末から独自ロボットOS=ART-Linuxの開発を進めてきているのだ。ちなみに、日本産のOSであること(正確にはパッチが開発されているわけだが)、Linuxベースであることなどは、世界的に見ても珍しいそうである。
ART-Linuxは、今年の3月19日に最新版となるバージョン2.6が一般公開され、誰でもダウンロードが可能となった。こちらはシングルプロセッサ用ということで、今後は先ほど説明したように分散処理用の機能(具体的には、マルチプロセッサ利用機能、実時間処理と優先度継承制御のためのシステムコールと解析機能、実時間通信機能の3つ)が追加されていく予定である。そうした機能を実現したOSを、難しい表現をすると「実時間並列ディペンダブルOS」という。何か問題が発生した時、原因がわかるような仕組みや、安全に関わるような部分は絶対にフリーズしたりしないといった機能を有するようになる。なお、加賀美氏らの研究は、「実時間並列ディペンダブルOSとその分散ネットワークの研究」として、平成20年度の戦略的創造研究推進事業にも採択されている。ヒューマノイド・ロボット、ロボット用RTミドルウェア、組み込みシステムでの実証実験を行ない、5年後の実用化を目指す形だ。
ART-Linuxの設計開発の経緯だが、1998年に旧電子技術総合研究所において國吉康夫氏(東京大学教授)のグループでスタート。最初は、Intel製x86アーキテクチャ用のLinuxカーネル 2.0に対応した実時間処理OSとして、まずART-Linux 2.0がリリースされた。2000年頃にはLinuxカーネル 2.2に対応したART-Linux 2.2がリリースされ、2004年頃にはカーネル 2.4に対応したART-Linux 2.4にバージョンアップ。ART-Linuxを搭載したロボットは、この2.4を搭載したものが多い模様だ。そして2007年にLinuxカーネル2.6に対応したART-Linux 2.6の開発がスタートし、この3月に最新版がリリースされたというわけだ。2.6は約100万行のカーネルソースに約2.5万行が追加され、Linux 2.6互換の実時間OSの中では群を抜く約15μsの周期実行が可能とされている。それから、x86アーキテクチャだけでなく、日立製作所製(現在はその流れを汲むルネサステクノロジが開発)のプロセッサSH4アーキテクチャにも対応している。
またART-Linuxは、日本のヒューマノイド型を中心に数多くのロボットに搭載されている。ASIMOのように搭載OSの情報を公開していないロボットもいるが、ヒューマノイド・ロボットに限れば、100%に近いシェア率に至っており、非ヒューマノイド型も含めると、国内外で100以上の採用事例があるという。確認できただけでも、産総研と川田工業などで最初に共同開発した「H6」(1999年)から始まって、その次に開発された「H7」(2001年)、新コンセプトのもとに開発された「HRP-1S」、その新型でメカ・キャラクターデザイナーの出渕裕氏がデザインした「HRP-2 Promet」(2003年)およびそのプロトタイプの「HRP-2P」、その新型の「HRP-3 Promet Mk-II」(2007年)およびそのプロトタイプの「HRP-3P」、そして3月に発表されたばかりの女性型の最新モデル「HRP-4C」など、加賀美氏が開発に関わったヒューマノイド・ロボットにはすべて搭載されている。
HRPシリーズの小型派生機である「HRP-2m チョロメテ」や、独立行政法人情報通信研究機構(NICT)の「i-1」、ART-Linuxの開発者の1人である國吉氏の研究室で開発された手足の反動を利用して起きあがる触覚センサー付きヒューマノイド・ロボット(固有名称は公式サイト上で掲載されていない)、横浜国立大学教授の藪田哲郎氏の研究室で開発されたヒューマノイド・ロボット「I-VY」などにも搭載。これらは、3月4日に日本科学未来館で開催された産総研のシンポジウム「デジタルヒューマン・シンポジウム2009」において、加賀美氏が行なった研究発表「サービスロボットの認識・計画・制御を統合した自律性向上を目指して」で紹介された。そのほか非ヒューマノイド型にも多数搭載されており、代表的なところではfuRo(千葉工業大学未来ロボット技術研究センター)開発の「Halluc II」に搭載されているほか、産総研開発の「自律型無人ヘリコプタ」などにも利用されている。
 |  |
| H6。加賀美氏が関わった初期のヒューマノイド・ロボット | H6の発展型のH7。写真は昨年の未来館友の会のツアーイベントで撮影したもの |
 |  |
| HRP-2。お馴染み、パトレイバー風味の顔で知られたロボット(昨年のツアーイベントで撮影) | Halluc IIなどの非ヒューマノイド型にも多数搭載(日本科学未来館ターミネーター展で撮影) |
なお、ロボットというと、組み込み機器的なイメージもあることから、実時間処理に強い日本オリジナルOSのTRON系が使われているように思われる方もいるかも知れない。しかし、先ほど説明した次世代型ヒューマノイド・ロボットの各種機能を実現しようとすると、TRONでは合わないようで、ロボットにはロボット用をということで、独自OSの開発が長年にわたって進められている。それから、念のためにLinuxについても簡単に説明すると、フィンランド人リーナス・トーバルズ氏がカーネル(中核)部分を開発した、PC用のフリーのOSである。WindowsやMacOSのような企業が開発したものとは異なり、誰でも無料で手に入れられるのが大きな特徴だ(セットアップが便利になるインストーラーや各種ソフトなどが追加された商品も発売されている)。
●ロボットの目と耳に関するデモンストレーション~まずは目から
今回のツアー内容はまだ2回目ということで、後からボランティアスタッフの方にうかがったのだが、あまりOSそのものの難しい解説は行なわないようにしたという。何しろツアー参加者はロボットに興味があるという点では一致していても、年齢は小学生からお年寄りの方まで年齢的にも非常に幅が広い。ロボットに関する知識ですらピンキリなのに、OSの知識ともなると、さらに理解度の幅が広がってしまうことだろう。そのため、今回はロボットを使ったデモや機能の紹介、研究内容の紹介をメインとしたようだ。その内容は、「ロボットの目」と「ロボットの耳」。続いては、それらを紹介しよう。
ロボットの目については、2つのレンズを用いて立体視できるシステム「二眼(ステレオ)カメラ」を用いてデモと解説が行なわれた。解説は、まず人間を始め大多数の動物がなぜ2つの目を持っているのか、という点からスタート。簡単にいえば、両眼による見え方の角度の差異=視差によって物体までの距離を検出できるからなのだが、二眼カメラも同じ理屈で作られている。ロボットが安全かつ高速で動き回るには環境の3次元マップを作ってそれを利用することが有力な方法と考えられており、それには両眼立体視による距離画像を用いる方法が適しているというわけだ。単純に、顔の構造を人に似せて親近感を持たせるためだけに目を2つ持たせたわけではなく(そういう狙いもないわけではないだろうが)、技術的な意味があって2つのレンズを使っているのである。
 |  |  |
| 研究室に移ってからも、最初はまずボランティアスタッフによる簡単な説明からスタート | 二眼カメラ。HRP-2のカメラと似ているような気がする | HRP-2にも二眼ステレオカメラが搭載されていた |
ちなみに、一般的な35mmの準広角レンズをロボットの視覚として用いるとすると、ロボットの視力は人の視力の0.1相当しかないそうである。はっきりいってメガネで矯正が必要な近眼である。クルマを運転できる(両眼使って)0.7以上から一般的に目がいいとされる1.2ぐらいを実現するとしても、少なくとも50倍から100倍程度は必要なのではないだろうか。とにかく、レンズの性能を上げるか、それが無理なら処理能力を上げないとならないのがわかる。
また、ヒューマノイド・ロボットに搭載されているカメラの画素数は800万程度なので、人の方が100倍以上も精密で細かい画像で周囲の環境を認識しているという。初めて訪れる未知の環境も含めて、さまざまな場所で人と同等の速度でロボットに協調も含めて活動させるためには、視覚センサーから得た空間情報を分析して動作計画を組み立てるという処理を、どれだけ早く行なえるかが重要となる。ロボットが人並みの視覚処理能力を得るためには、大容量で高速推論する能力が重要なので、その分野の研究開発に比重を置いて進めていく必要があるのだそうだ。
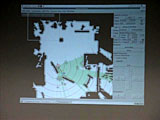
二眼カメラを用いたデモでは、スクリーンに計5つのウィンドウを表示して解説が進められた。ウィンドウの内容は、映像が4つで、プログラムの動作状況を表示していると思われるコンソール画面の文字情報が1つだ。3つの映像はどれも二眼カメラの前方に置かれた箱と大きなサッカーボール柄のビーチボールを映しているのだが、左側の3つの小さな映像の内、一番上は左側のレンズの通常の映像。真ん中の緑色の映像は、明るければ明るいほど距離が近いことがわかるというものだ(物体までのそれぞれの距離がわかる)。一番下は、床などの平面を判別したところを表示している(最も広い平面である床が赤で表され、箱など何らかの物体上の狭い平面はみな青で表される)。右の大きな映像は、それらの情報を合成して作成した3次元CGで、ロボット的にどのように物や周囲の環境が見えているかがわかるようになっている。なぜまず平面を判別しようとするのかというと、まずロボットが立つのは、現在のところはまず床の上だからというのが1つ。そして、その床の上に多くの物体がある場合、それらを判別するためには、ベースとして床をまず判別する必要があるからというのが2つ目の理由だ。
また途中で、左下のウィンドウの内容を交換し、物体の判別をしている様子も見られた。現状では物体を形で判別しているため、異なる物体はみな異なる色を塗って示しているのだが、まったく違う物でも接触してしまうと同じ1つの物体として判別してしまうという。実際、二眼カメラの視界内に立っていた参加者の方の足も、箱やボールに近い人たちのものはそれらとくっついて、それぞれ1つの物体と見なされてしまうこともあった。このように物の形状を見分けることはできるようになってきたのだが、それが何であるのか「認識」はまだまだ。直方体と球体がカメラの視界内にあることは判別できても、それらが箱とサッカーボール柄の大きなビーチボールであることは認識できていないのである。今後は、判別した形から何の物体であるかを認識できるようにすることが課題としていた。
 |  |  |
| 二眼カメラの前の箱とボール | 二眼カメラがとらえた映像と、それを処理した3種類の映像とコンソール画面を映した画面 | こちらは、物体を判別している映像に左下のウィンドウを交換したところ |
●マイクアレイ搭載ロボット「Penguin2」でロボットの耳の実験
続いて行なわれたのが、ロボットの耳についての解説。こちらは、昨年のレポートでも紹介したが、「Penguin2」という8個のマイクアレイロボットを使ったデモが行なわれた。
Penguin2は、人のヒザぐらいまでのサイズで箱形をした車輪型ロボットで、頭頂部分に8個のマイクアレイ(コンデンサーマイクロフォンと呼ばれる指向性マイクを4個搭載し、合計32個のマイクが搭載されている)が同心円上に並べられているのが特徴。対角線上のマイクアレイ同士は34cm離れており、1気圧の地表面でのおよその音速が340m/sであることから、音源に最も近いマイクから最も遠いマイクまでおよそ1/1,000秒かかることになる。人にとって1/1,000秒というと、モータースポーツの世界での極限のタイムの削り合いのように、もはや人間が感覚でとらえられる時間ではないが、コンピュータにとっては余裕のある時間。この間に50回ぐらいは音の計測を行なえるそうだ。
 |  |
| 【動画】Penguin2の動作する様子 | Penguin2の頭頂のマイクアレイ |
デモでは、文字情報や、音源の方向をレーダーチャート上で濃淡を使って表すウィンドウなどが並んだ画面も使って解説がなされた。音源の方向が最も濃くなる仕組みで、おおよその音源がわかる。ある程度の時間同じ位置から音が出ていれば、ほぼ確実な位置も判別可能だ。音源の位置の特定は、音の到達時間のズレを修整することで行なえる。複数の音がある場合、最もパワーの強い音を分析して強調し、定位確定を行なった後、その周波数帯を除去してやることで、次に強いパワーの音に取りかかれるという具合だ。それにより、複数の方向からそれぞれ異なる音が出ていたとしても、別個に切り分けて録音し、再生できるのである。この研究は、ノイズの多い環境下でもロボットが人から声をかけられた時にしっかりと返事をできるようにすることが目的だ。
 |  |
| 濃淡を使って音源の方向を表すレーダーチャート | 音源を特定すると、オレンジ色の実線でその方位を示す |
そして、実際に複数の音を切り分けられるかどうかは、ツアー参加者2名が異なる位置に座ってそれぞれ内容の異なるテキストを朗読し、なおかつBGMとしてクラシックを流して実証実験を行なった。その後に個別に音声を再生すると、背後にかすかにクラシック曲が聞こえるが、まるで1人ずつ録音したかのようにクリアに再生されており、聞き分けが成功していることを実証。Penguin2は、最大で5~7人ぐらいまで聞き分けられるのだそうだ。
ちなみに、完全に同一方向(1名の後ろにすぐ重なるようにしてもう1名がいるといった場合)で読み上げられると、現在は切り分けができないということである。方位さえ異なっていれば、仮に同一人物が同じ内容を同じように読み上げたとしても切り分けられるという。なお、今回デモで使用されることはなかったが、マイクを128個ぎっしり敷きつめたマイクアレイも研究室で見ることができた。
 |  |  |
| 【動画】実験で参加者2名がクラシック曲の流れる中、異なる文章を音読 | 【動画】それを再生すると、1人ずつ録音したかのように再生された | 128個マイクを搭載したマイクアレイ |
●センサーで環境を認識して目標地点へ移動するデモ
続いてのデモもPenguin2を使ったもので、センサーを用いて環境を認識し、指定された目標地点へ自律移動するという内容だ。Penguin2はデモを行なった研究室内のマップを持っているのだが、前面にレーザーレンジ(距離)センサーも備えており、周囲の環境をリアルタイムに認識できるという機能も持つ。それでマップ上にない障害物などを認識した上で、Penguin2は指定された目標地点へ移動することができるというわけだ。
Penguin2は移動命令が与えられると、マップ情報にレーザーレンジセンサーで得たリアルタイムの障害物情報を加え、まずは自分の現在位置と周囲の環境の認識を始める。続いて、そこから命令された地点へ移動するにはどのようなルートが適切か、「行動足跡計画」を考えていく。マップに載っていない新しい障害物が置いてあっても、それを考慮した上で経路を見つけ出せる柔軟性を有している点も特徴の1つだ。加賀美氏によれば、こうした障害物を避けて移動するという技術は既に実現しているが、一番の問題は費用だという。Penguin2も開発費用のほとんどが高価なレーザーレンジセンサーだそうだ。ちなみに、レーザーレンジセンサーがどれぐらいするかというと、もちろん幅はあるのだが、多くのメーカーが「価格は直接お問い合わせ下さい」とWeb上では掲載していない。価格が表示されていないということから、とても高価であることが想像つくだろう。ちなみに、Web上で価格が載っていたものもあったのだが、50万円以上していた。
 |  |
| 【動画】研究室のマップに、レーザーレンジセンサーで調べた最新の障害物情報を追加した画面 | 【動画】実際にPenguin2の動きとマップの連動している様子 |
それからもう1つの考慮すべき点として、自動的に動き回るものなので、安全性の面も大きな点とする。Penguin2は、人のように立体的に見ているわけではなく、レーザーレンジセンサーがセットされている一定の高さを2次元平面でしかセンシングしていないため、よくつま先を踏まれるのだそうだ。そのほか、こうしたツアーイベントでは、幼稚園・保育園ぐらいの小さな子も親に連れられてくるそうだが、まったく怖がらずに飛びかかってくるような子もおり、絶対にケガをさせないようにはどうすればいいかということで、課題になっているという。この点は、実社会での利用における安全性の問題にも通じるわけで、非常に重要なポイント。だが、ロボットに危険だからしてはいけないということを教えるのはとても大変らしい。人の前を横切ってはいけないという具体的な行動の前に、まず人がどんな形をしていて、どんな動きをする存在なのかという基本中の基本情報の時点で大変だという。
なぜ難しいかという理由の1つは、人を人として認識できるセンサーがまだ実現していないこと。現状、人として認識するためには、いくつものセンサーを組み合わせてやっと「人間の可能性が高い」といった感じだろう。カメラやレーザーセンサーなどで3次元的な形状を把握すると同時に動きの検出も行ない、赤外線センサーで熱を、さらにマイクを通して話し声や心音などを感知してやっと判別できる、といったところではないだろうか。熱検知型の形状識別と動作検出ができるシステムなら、単体でも人を認識できそうだが、真夏の屋外などでは熱感知はかなり役に立たなくなってしまうので、いつでもどこでもというわけにはいかない。人は人を当たり前のように認識できるし、目をつぶっていてすら人の気配などを感じ取れるわけだが、ロボットには人を人として認識するのがまだまだ難しいというわけである。
以上が今回のツアーの主な内容だ。なお、今後ボランティアスタッフの習熟が進み、お客さんにどこまでOSについて専門的な話をしても大丈夫かが見えてきたら、内容を変更していくという。もっと専門的な話を聞きたい人は、あと半年ぐらい待ってからツアーに参加するといいかもしれない。ちなみに、日本科学未来館のツアーイベントは、ほかにも3種類ある。細胞の中でエネルギー源となるATPを作る酵素の回転運動の制御についての研究を紹介する「細胞の中でまわる酵素~ATP合成制御プロジェクトツアー」(毎月第1・第3土曜日11:30~12:15)、デンドリマーなどが作り出すナノ空間の持つ機能と特異性を探求する「ナノスペースプロジェクトツアー」(毎月第1・第3土曜日14:30~15:15)、センサーを用いて子供の日常行動を収集・分析して発生しやすい事故を減らすための研究を紹介する「子どもの事故予防工学プロジェクトツアー」(毎月第2・第4土曜日14:30~15:15)だ。
なかなか目にできない研究室に入れ、研究者からも話を聞けるツアーなので、興味のある方は、ぜひ参加してみよう。同館に入館する必要はあるが(大人600円・18歳以下200円)、事前に申し込む必要などはなく、ツアー開始30分前に1階ラボツアールーム前で受付を済ませれば参加できる。定員はATPツアーのみ10名だが、ほかは15名。なお、ロボット系のツアーは人気が高いそうで、ロボットOSプロジェクトツアーも取材した際は定員オーバー気味。早めに並ぶといいだろう。
2009/5/12 20:33