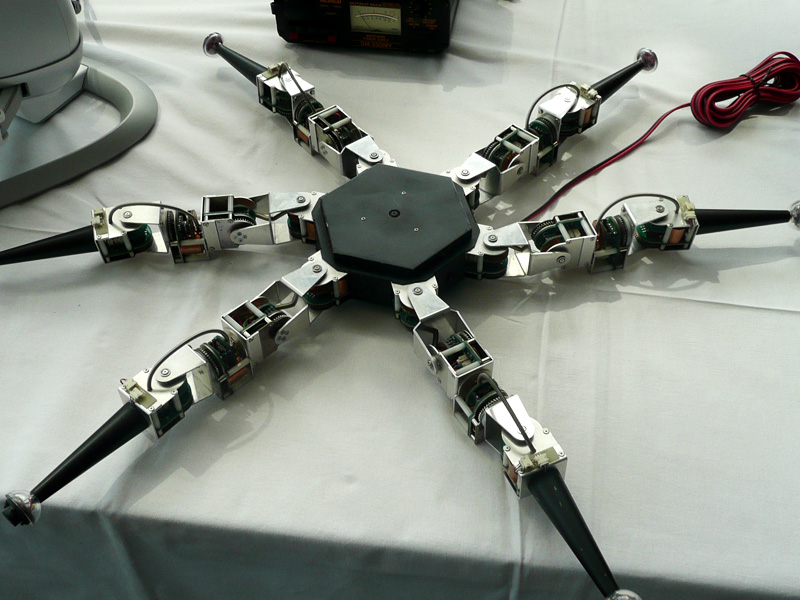
【写真49】研究のために開発された、クモのような作業用6脚ロボット。合計24個の関節を備えており、それぞれの関節についたセンサーの情報をパソコン側にフィードバックし、画面上でロボットの姿勢状態をリアルタイム表示
Copyright (c) 2009 Impress Watch Corporation, an Impress Group company. All rights reserved.