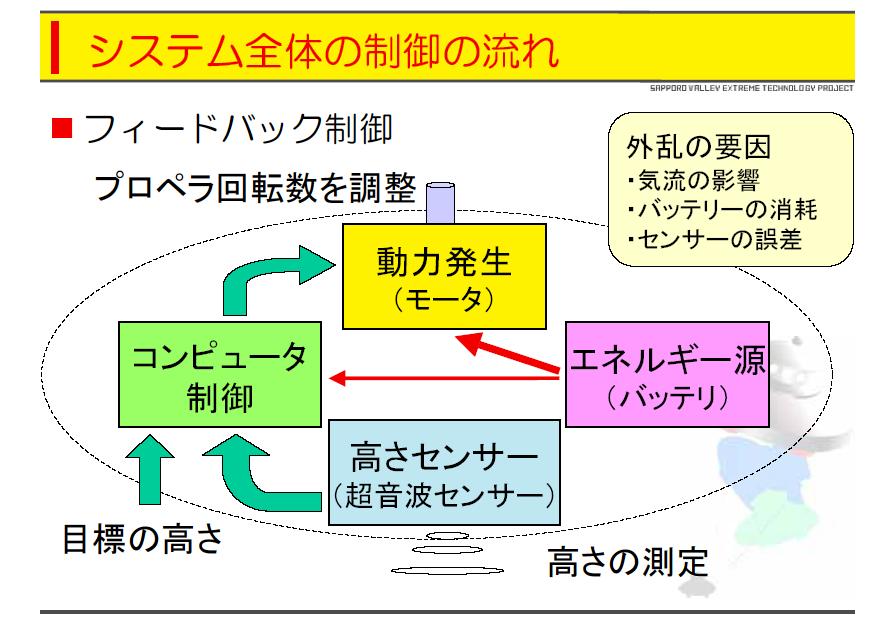
【図8】浮遊ロボットのシステム制御の流れ図。自律型制御として、超音波センサで地表からの距離を測りながら、目標となる高さを維持。高さに合わせて推力(モータの回転力)を制御するため、フィードバック制御を行なう
Copyright (c) 2006 Impress Watch Corporation, an Impress Group company. All rights reserved.