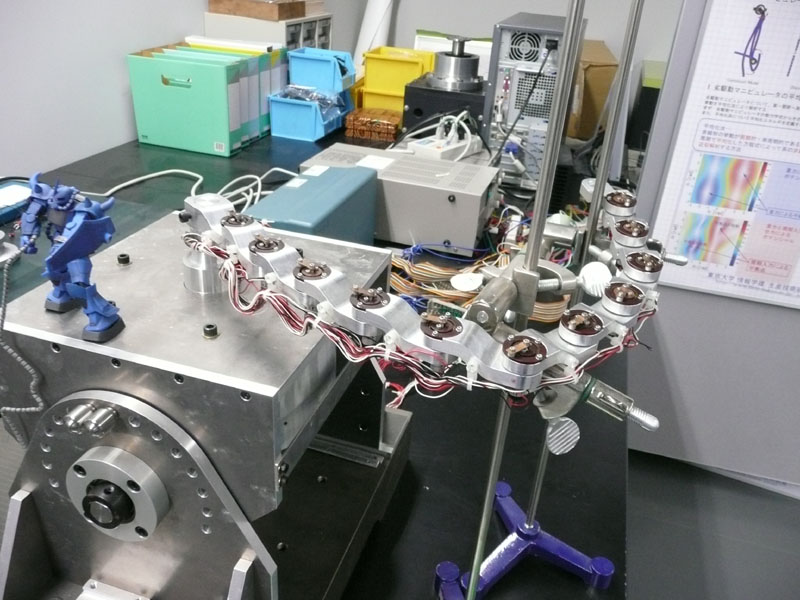
【写真23】受動関節で連結されたリンク機構。超柔軟の動力学モデルとなるもの。根元関節部のみのアクチュエータで先端部をダイナミックに安定化させるため、高度な制御理論が必要だという
Copyright (c) 2008 Impress Watch Corporation, an Impress Group company. All rights reserved.